

Humanoid intelligent controlled obstacle avoidance control method based on reinforcement learning
A technology of reinforcement learning and intelligent control, applied in two-dimensional position/channel control, adaptive control, general control system, etc., can solve problems such as high-cost application limitations, falling into local extremes, unsuitability, etc., to achieve good practicality Sex and development potential, the effect of high obstacle avoidance rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0024] The whole process of intelligent obstacle avoidance control is divided into three stages, each stage and its control objectives are as follows:
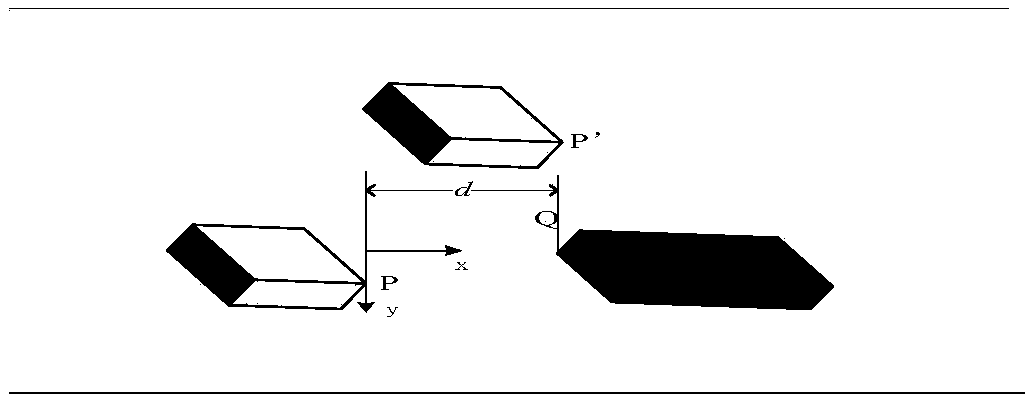
[0025] S1. Obstacle avoidance initialization stage: Obstacles appear in the area of interest in front of the vehicle, determine the relationship between the distance d and the safety distance S between the two, if d≥S, start implementing obstacle avoidance, if d<S, the vehicle cannot achieve effective obstacle avoidance ,parking.
[0026] In order to avoid collisions, the safe driving distance must be considered so that collision accidents will ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More