

Intelligent robot for harvesting garlic sprouts and working method thereof
An intelligent robot and robot technology, applied in harvesters, agricultural machinery and implements, applications, etc., can solve problems such as affecting growth, garlic plant lodging, and continued growth of garlic without consideration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
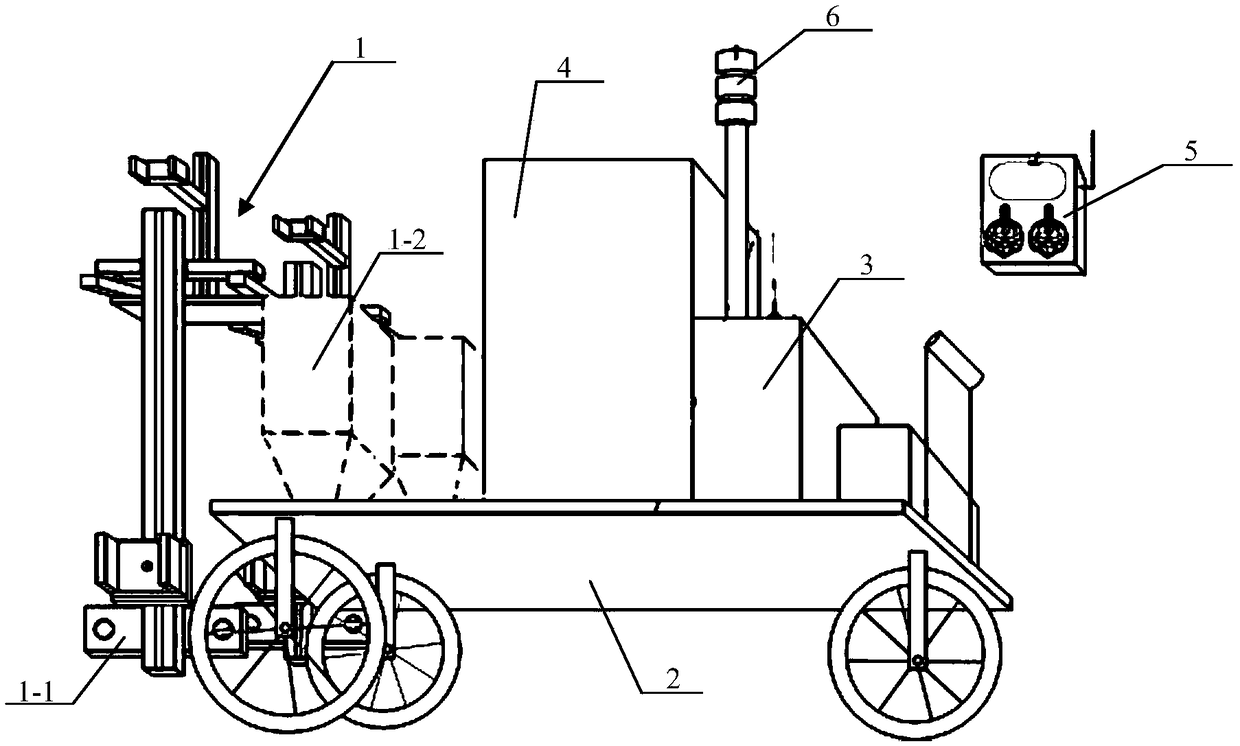
[0056] Such as Figure 1-3 As shown, a kind of intelligent robot for harvesting garlic sprouts includes a harvesting device 1, a mobile platform 2, a control system 3 and a power system 4 that provides power for the robot;
[0057] The mobile platform 2 is a mobile vehicle body, the power system 4 and the control system 3 are located above the mobile platform 2, and there are multiple harvesting devices 1, which are located at the front end of the mobile platform 2 in a flush manner, and multiple harvesting devices 1 can be carried out in parallel. Combined operations to improve harvesting efficiency; each harvesting device 1 includes a three-dimensional three-dimensional sliding table, clamping and lifting and tie-up components, identification and positioning components 1-1, sprout delivery components and garlic sprout containers 1-2;
[0058] The three-dimensional sliding table, clamping and lifting and tying components, identification and positioning component 1-1, stalk fe...
Embodiment 2
[0060] An intelligent robot for harvesting garlic sprouts has a structure as shown in embodiment 1. The difference is that the intelligent robot for harvesting garlic sprouts also includes a remote controller 5, and the remote controller 5 is connected with the control system 3 through wireless communication;
[0061] The mobile platform 2 adopts a high-foot tricycle body, and the wheels adopt solid rubber narrow tires;
[0062] The robot also includes a multifunctional annunciator 6 for indicating the working state of the robot. The harvesting device 1, the control system 3, the power system 4, and the multifunctional annunciator 6 are all integrated and installed on the mobile platform 2, and the robot is realized through the mobile platform 2. For traveling and turning, the multi-function annunciator 6 is also connected with the control system 3;
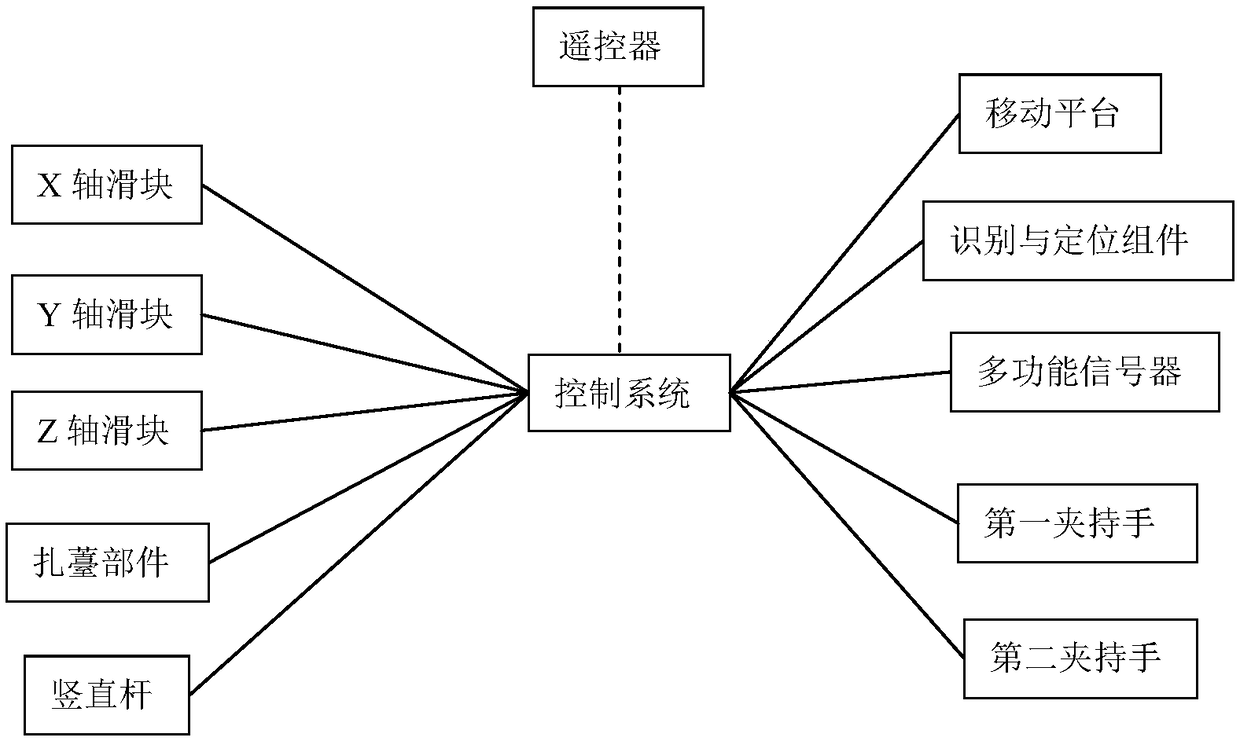
[0063] The control system 3 is a collection of software algorithms and hardware boards with an embedded computer (ARM, etc.) as...
Embodiment 3
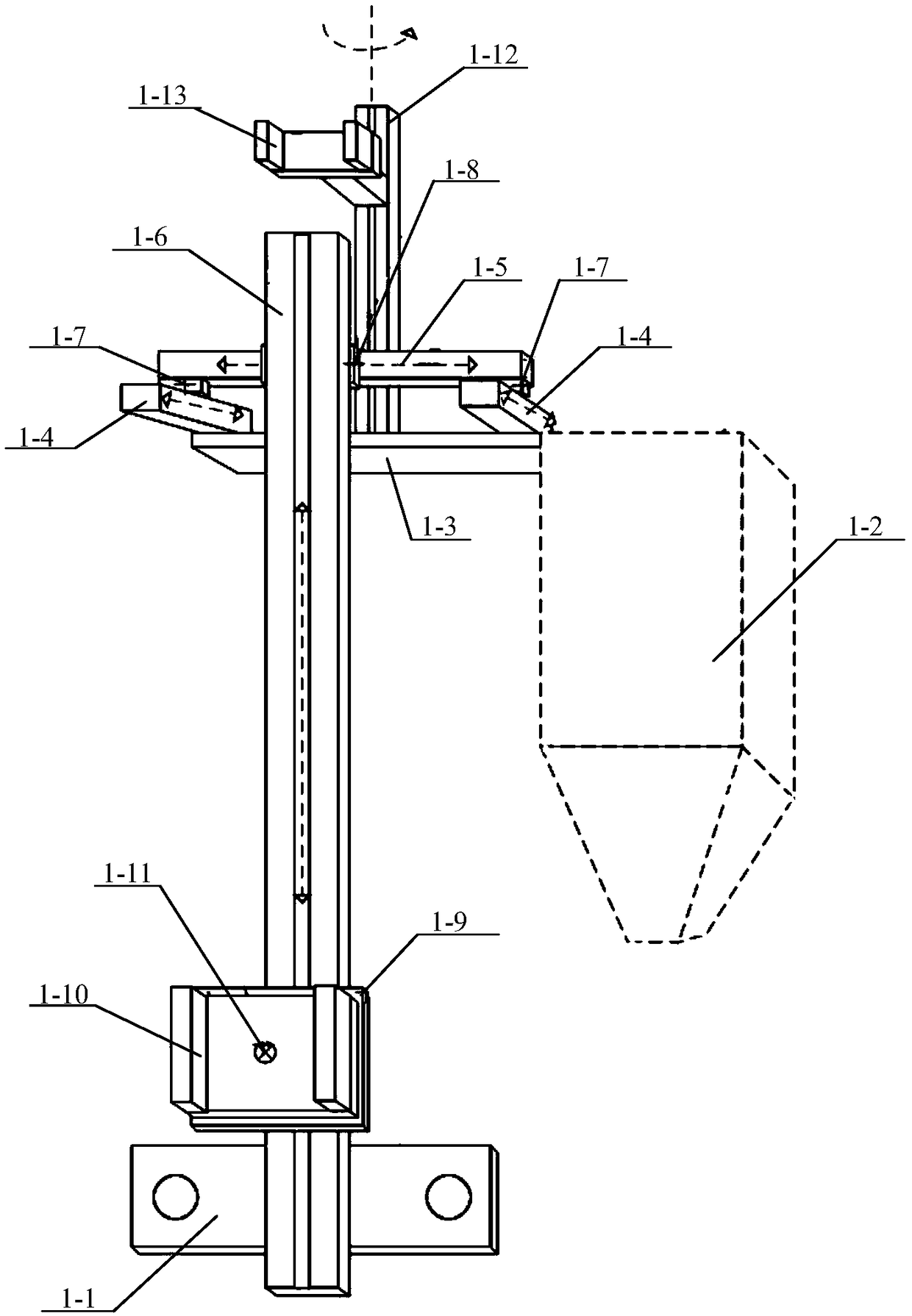
[0065] Such as figure 2 As shown, a kind of intelligent robot for harvesting garlic sprouts, as shown in embodiment 1, the difference is that the garlic sprouts container 1-2 is located at the front end position on the mobile platform 2, and the garlic sprouts container 1-2 is fixedly provided with a base 1-3 , the three-dimensional slide table is located on the base 1-3.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More