

A Robot Navigation Method Based on the Neural Mechanism of Visual Perception and Spatial Cognition
A technology of spatial cognition and visual perception, applied in the field of brain-like navigation, which can solve the problems of high difficulty in brain science exploration and few breakthroughs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0081] Example 1 Robot Navigation under Illumination
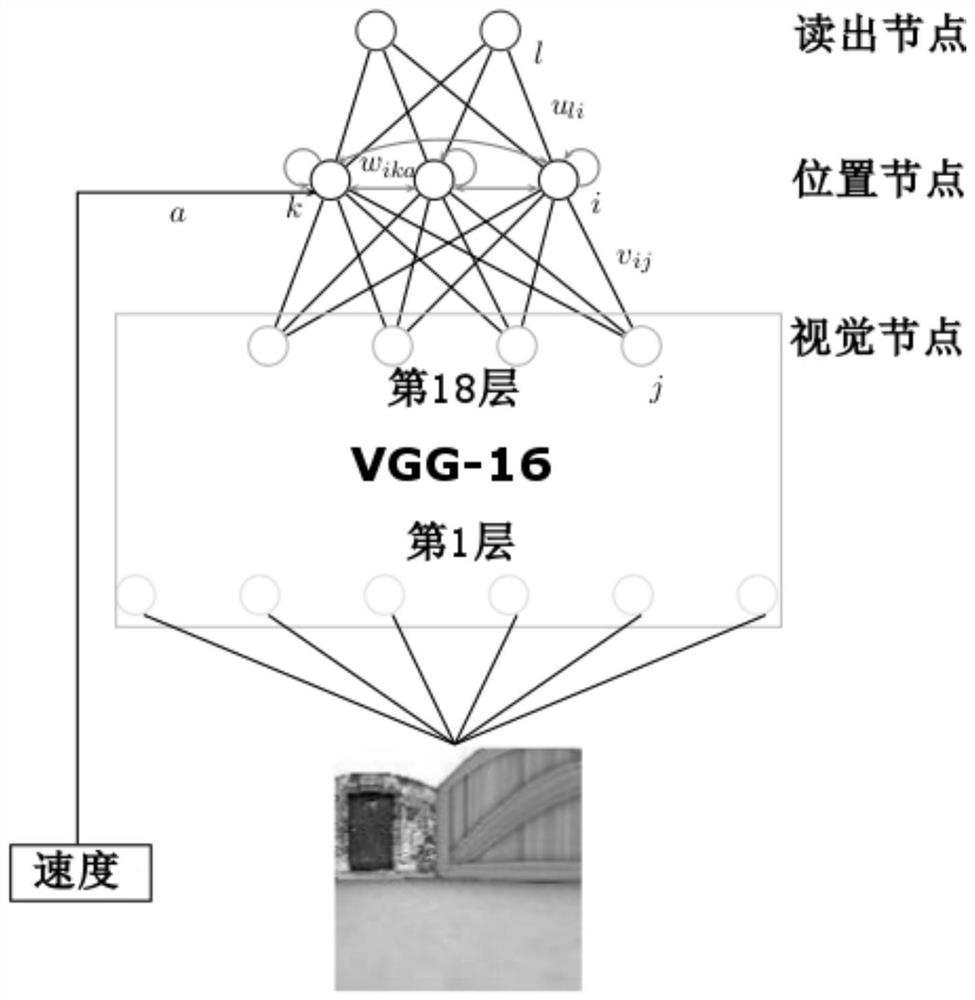
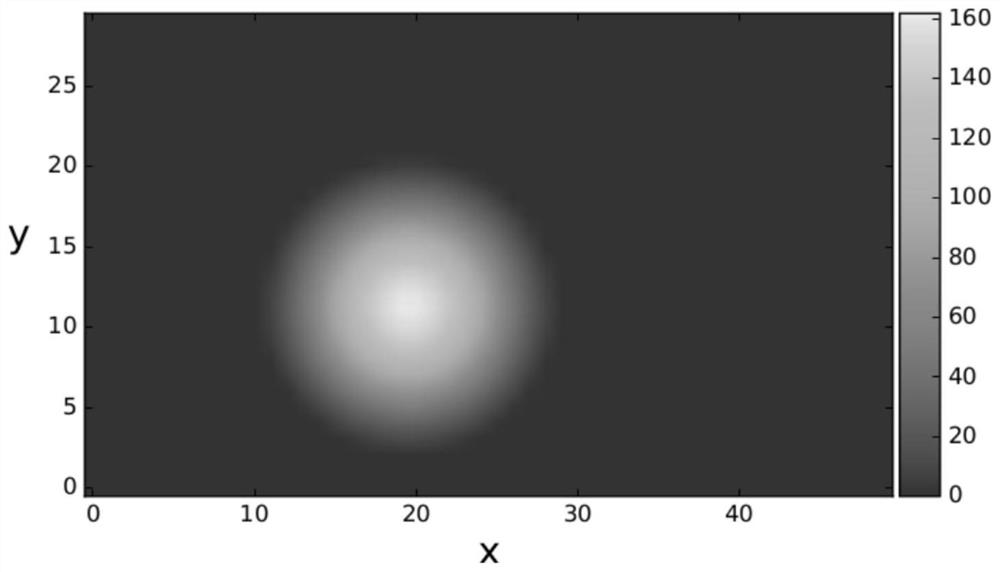
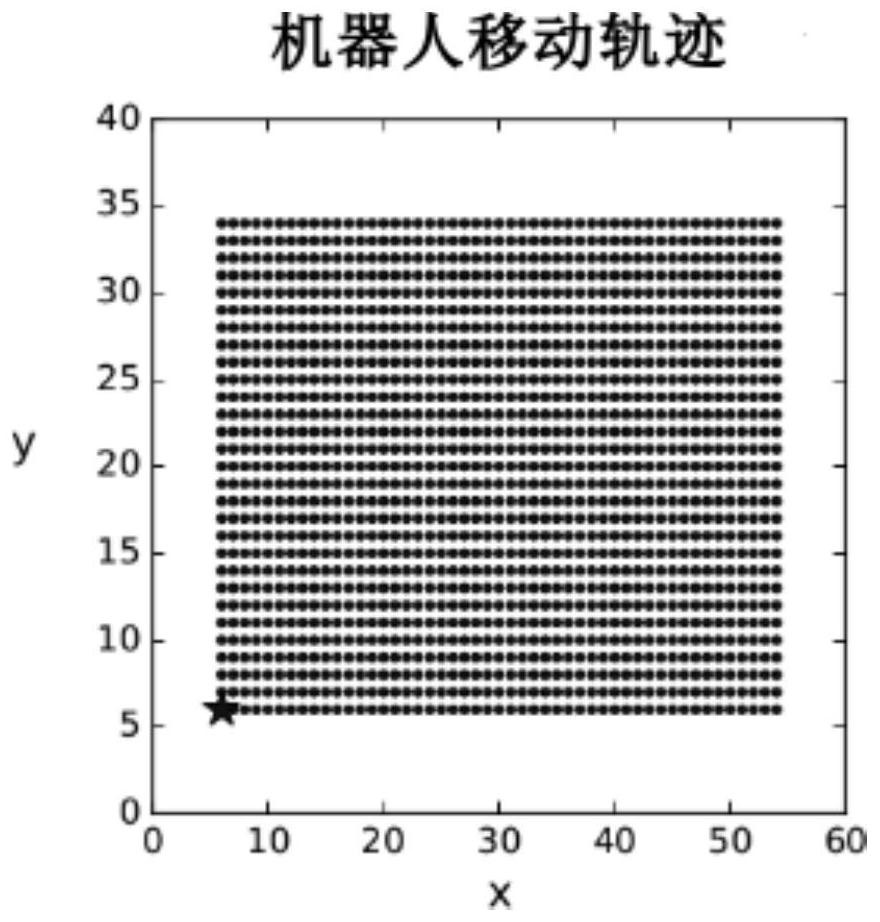
[0082] Under lighting conditions, the system is stimulated by multiple information sources of visual images and robot motion. At time t, many position nodes form such figure 2 The discharge peak area (bump) shown. Such as Figure 3a-3d As shown, x and y represent the positions in the x and y directions, respectively. The movement of the bump on the spatial cortex is proportional to the movement of the robot in the simulated environment, and the normalized difference is close to 0. Therefore, the system designed by the present invention is dynamic, realizes the conversion of the robot's motion plane and the spatial cortex, and helps the robot to learn a two-dimensional spatial cognitive map of its environment. refer to Figure 4 , when the robot is in different head orientations, the spatial responses of the position nodes are consistent, forming a firing pattern similar to the “place field” of place cells. According...
Embodiment 2
[0083] Example 2 Robot navigation in the dark
[0084] In the dark condition, the stimulation of the visual image to the system disappears, but the bump formed by the position node in the spatial cortex at time t still exists, and if Figure 6a~6b The shown has similar dynamics as in Example 1, that is, the motion of the bump in the spatial cortex is proportional to the robot speed.
Embodiment 3
[0085] Embodiment 3 Robot navigation under the condition of motion noise
[0086] When there is random noise in the speed information of the robot, the system still has anti-interference ability, such as Figure 7a As shown in ~ 7d, the normalized error between the bump's motion and the actual robot motion fluctuates in a small range around 0.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More