

Robot control method and system based on admittance control algorithm
A technology of control method and control algorithm, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems that cannot meet the requirements of robot speed and sensitivity, and achieve immersion and realism, compliant control, response speed and Effect of Sensitivity Improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention is further illustrated below by means of examples, but the present invention is not limited to the scope of the examples.
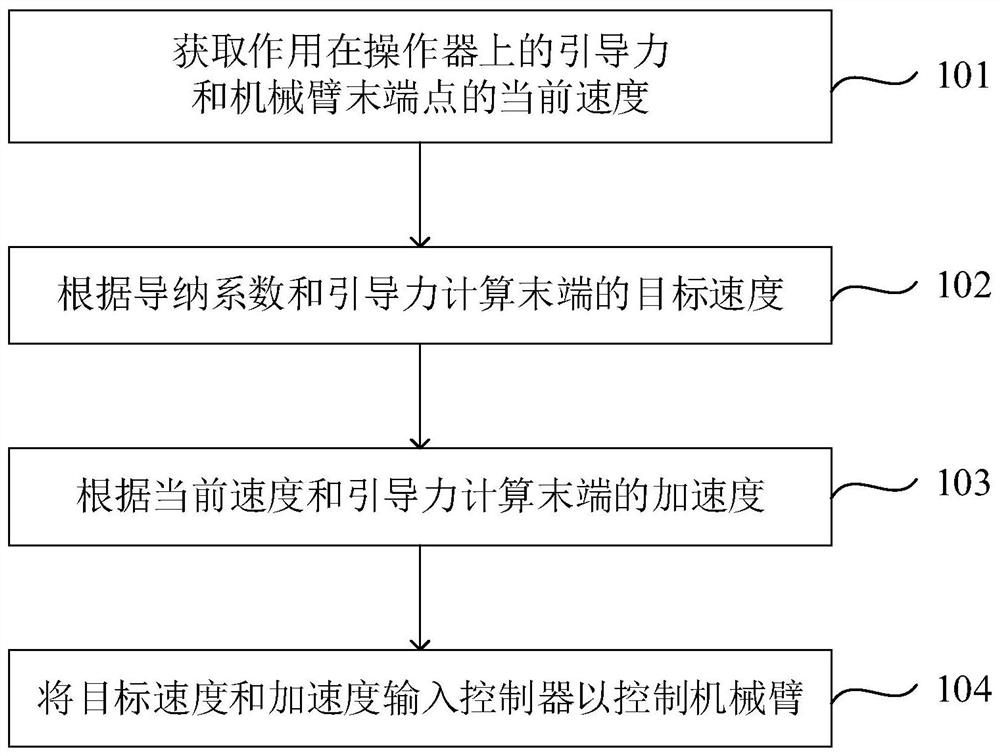
[0051] This embodiment provides a method for controlling a robot based on an admittance control algorithm. The robot includes a multi-joint manipulator and a controller, and a manipulator is provided at the end of the manipulator. Such as figure 1 As shown, the robot control method of the present embodiment includes the following steps:
[0052] Step 101. Obtain the guiding force acting on the manipulator and the current speed of the end point of the mechanical arm.
[0053] Specifically, the acquisition of the guiding force can be obtained through a multi-dimensional torque sensor (such as a six-dimensional torque sensor). The multi-dimensional torque sensor is installed at the end of the robotic arm. When the operator directly contacts and drags the manipulator, the sensor can obtain the guiding force data.
[0054]
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More