

Scheduling method and system for multi-robots and multi-elevators
A multi-robot, dispatching method technology, applied in elevators, transportation and packaging, etc., can solve problems such as unreasonable allocation of elevator public resources and affect transportation efficiency, and achieve the effects of reducing transportation time, improving transportation efficiency, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
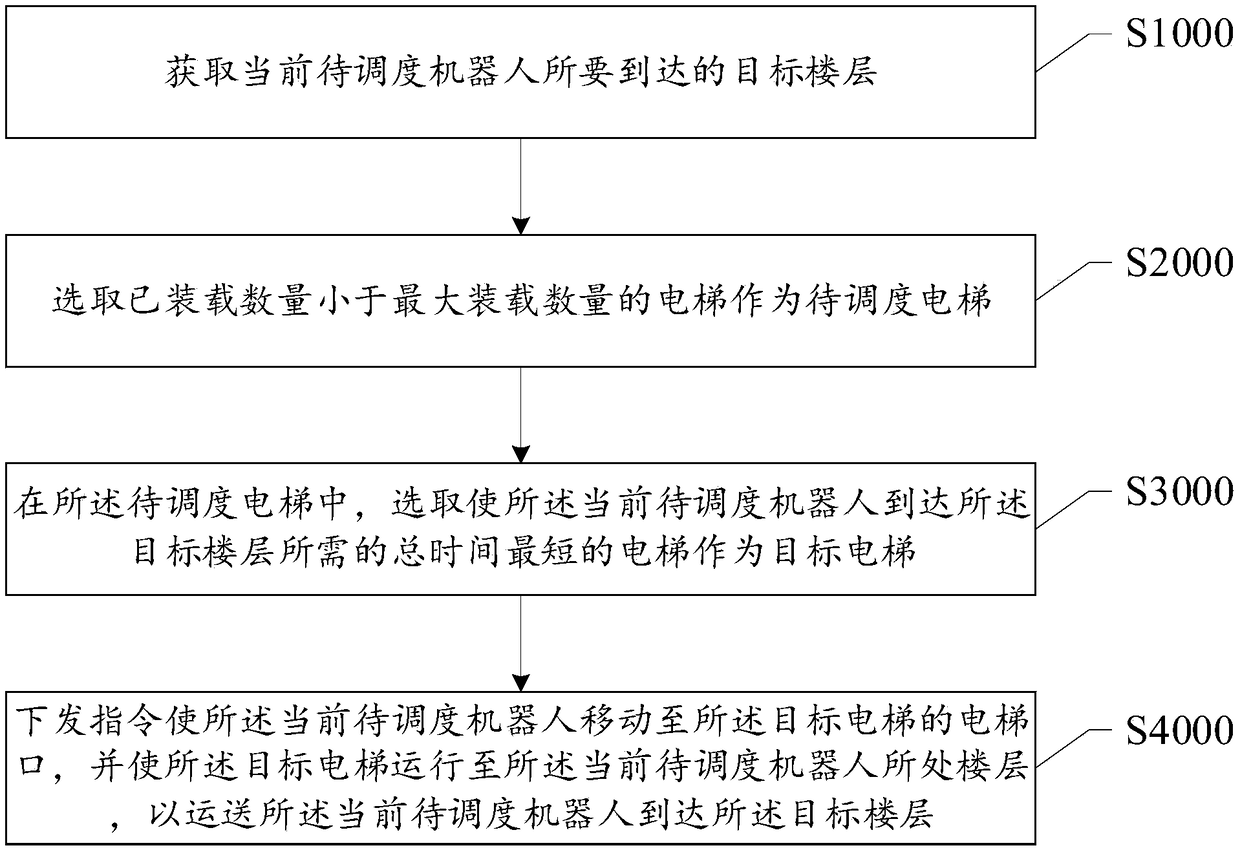
[0071] According to the first embodiment provided by the present invention, such as figure 1 As shown, a multi-robot and multi-elevator scheduling method includes:
[0072] S1000 acquires the target floor to be reached by the robot to be dispatched currently;
[0073] S2000 selects the elevator whose loaded quantity is less than the maximum loaded quantity as the elevator to be dispatched;
[0074] S3000, among the elevators to be dispatched, select the elevator that takes the robot currently to be dispatched to reach the target floor with the shortest total time as the target elevator;
[0075] S4000 Issue an instruction to make the robot to be dispatched currently move to the elevator entrance of the target elevator, and make the target elevator run to the floor where the robot to be dispatched currently is, so as to transport the robot to be dispatched to the target floor.
[0076] Specifically, this embodiment can be used in various robot transportation scheduling scena...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More