

Unmanned aerial vehicle cluster cooperative reconnaissance method based on crossover and variation pigeon flock optimization
A UAV and swarm optimization technology, applied in the direction of non-electric variable control, instrument, attitude control, etc., can solve the problems of low search efficiency and low target search and capture ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
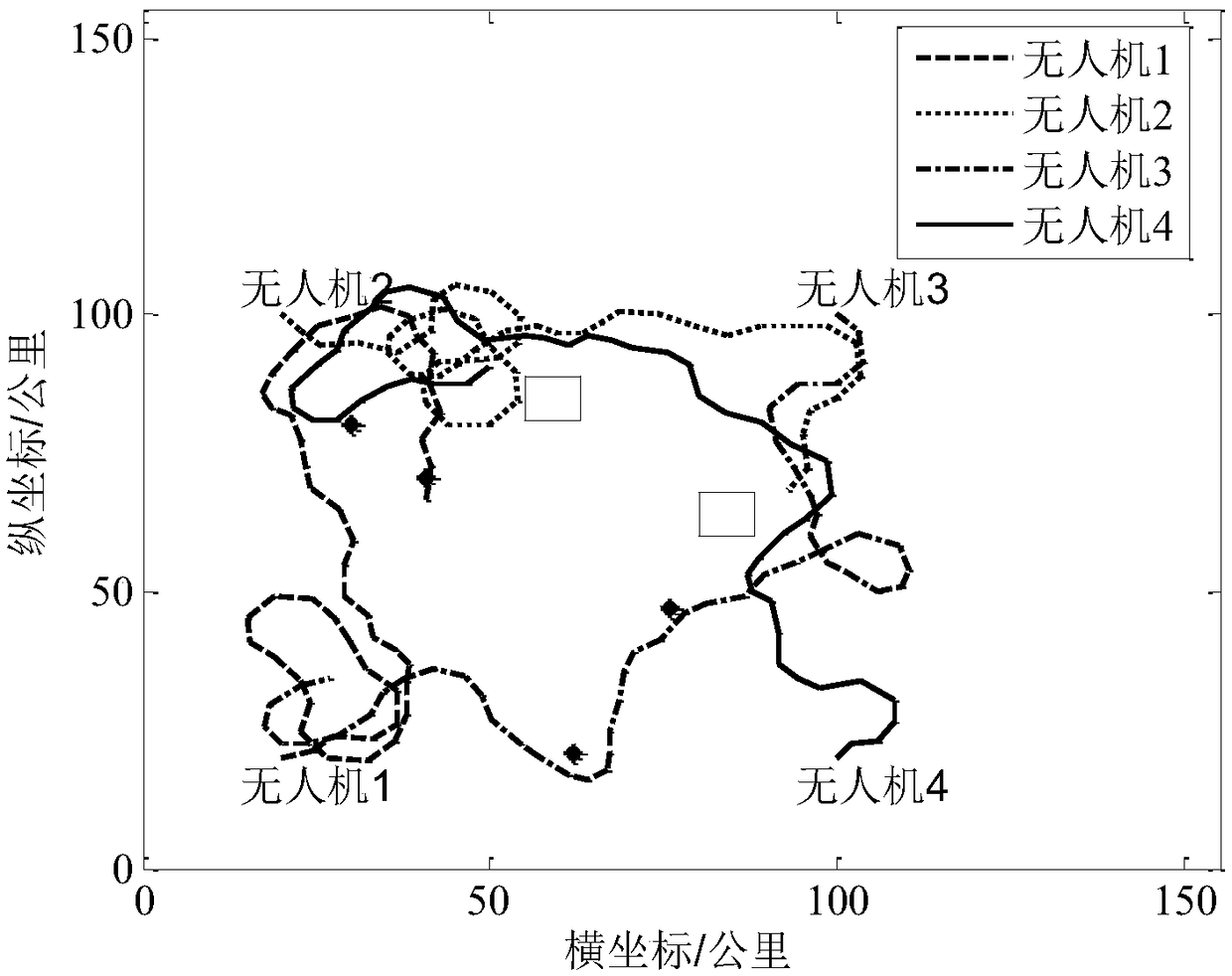
[0135] The effectiveness of the method proposed by the present invention is verified below through a specific instance of unmanned aerial vehicle cluster reconnaissance.
[0136] The invention uses four unmanned reconnaissance planes to conduct reconnaissance on four discrete targets in a three-dimensional area to realize three-dimensional simulation. Assume that the drone is at the same height and the target of the drone's reconnaissance has no ability to attack.
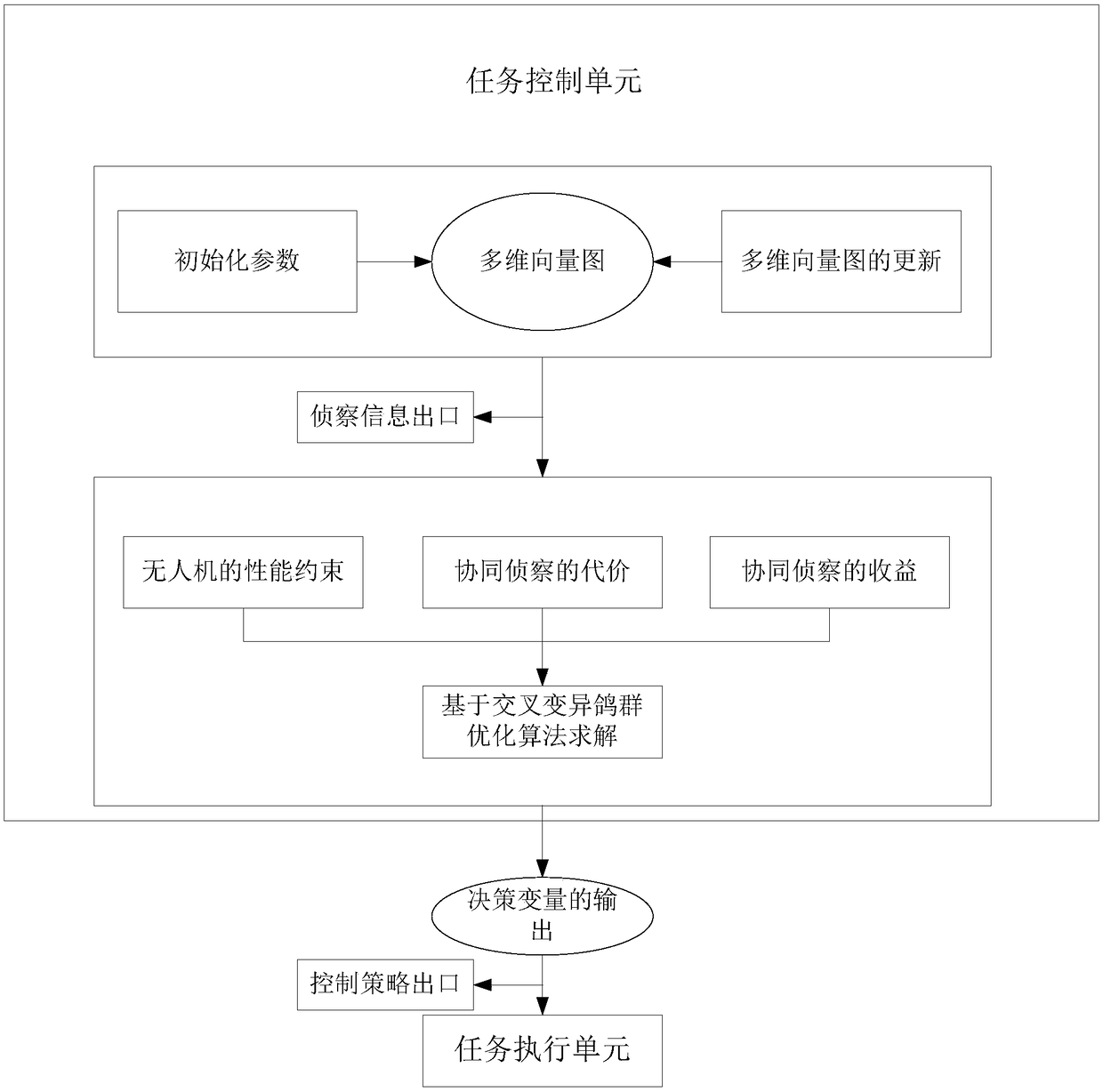
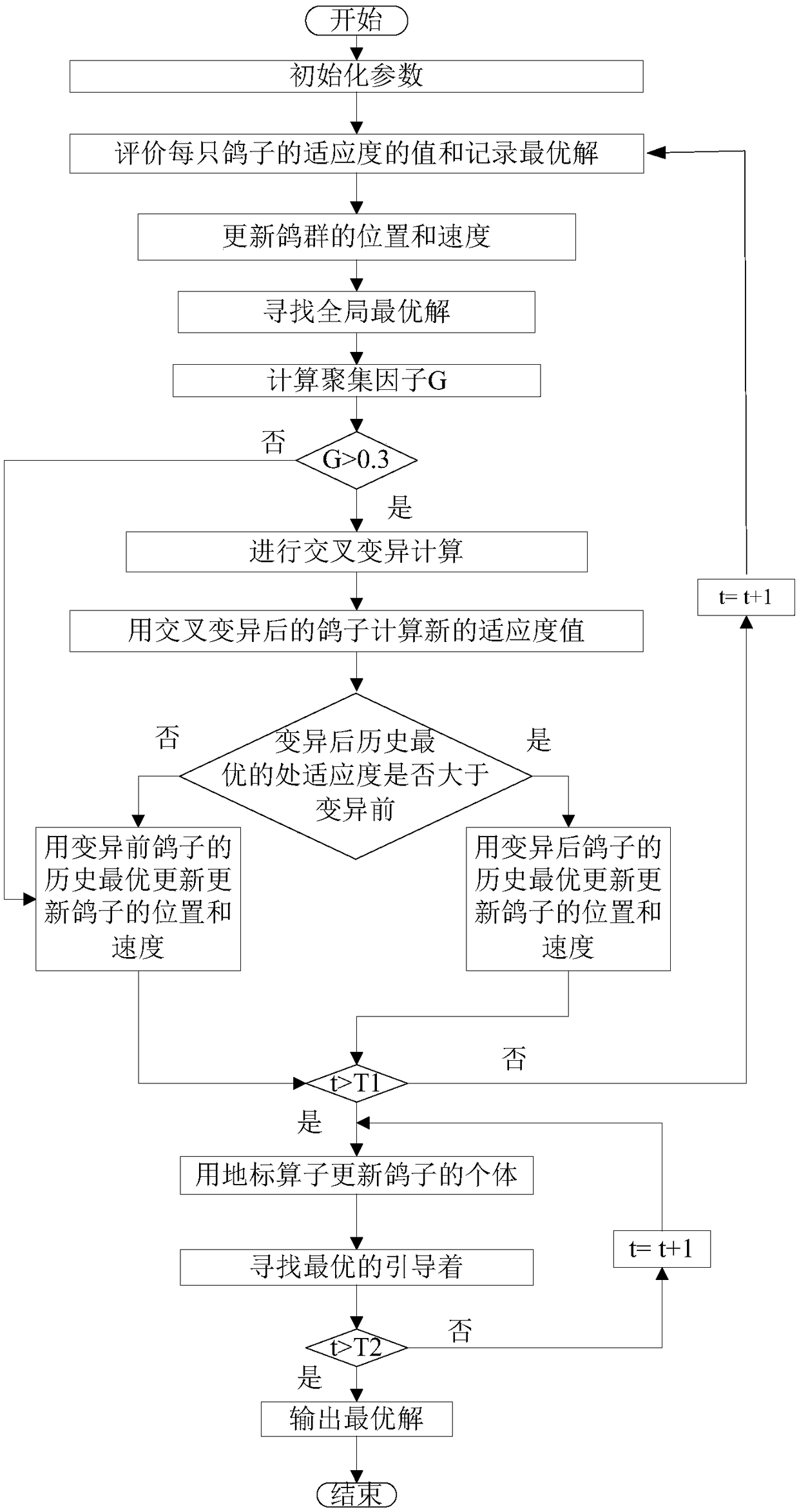
[0137] like figure 1 , figure 2 As shown, a UAV swarm cooperative reconnaissance method based on cross mutation pigeon group optimization, the specific steps of the method are as follows:
[0138] Step 1: Initialization of Scouting Environment
[0139] Use 4 drones to survey an unknown area 4 stationary targets to perform reconnaissance missions, and place the mission area Divided into a discrete grid of 80×80. For each grid v∈{1,2,3,...,80×80}, assign a certain value Z v (l), where Z v (l) is an informa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More