

Driving path planning method based on state grid method
A technology of path planning and grid method, applied in two-dimensional position/course control, vehicle position/route/altitude control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
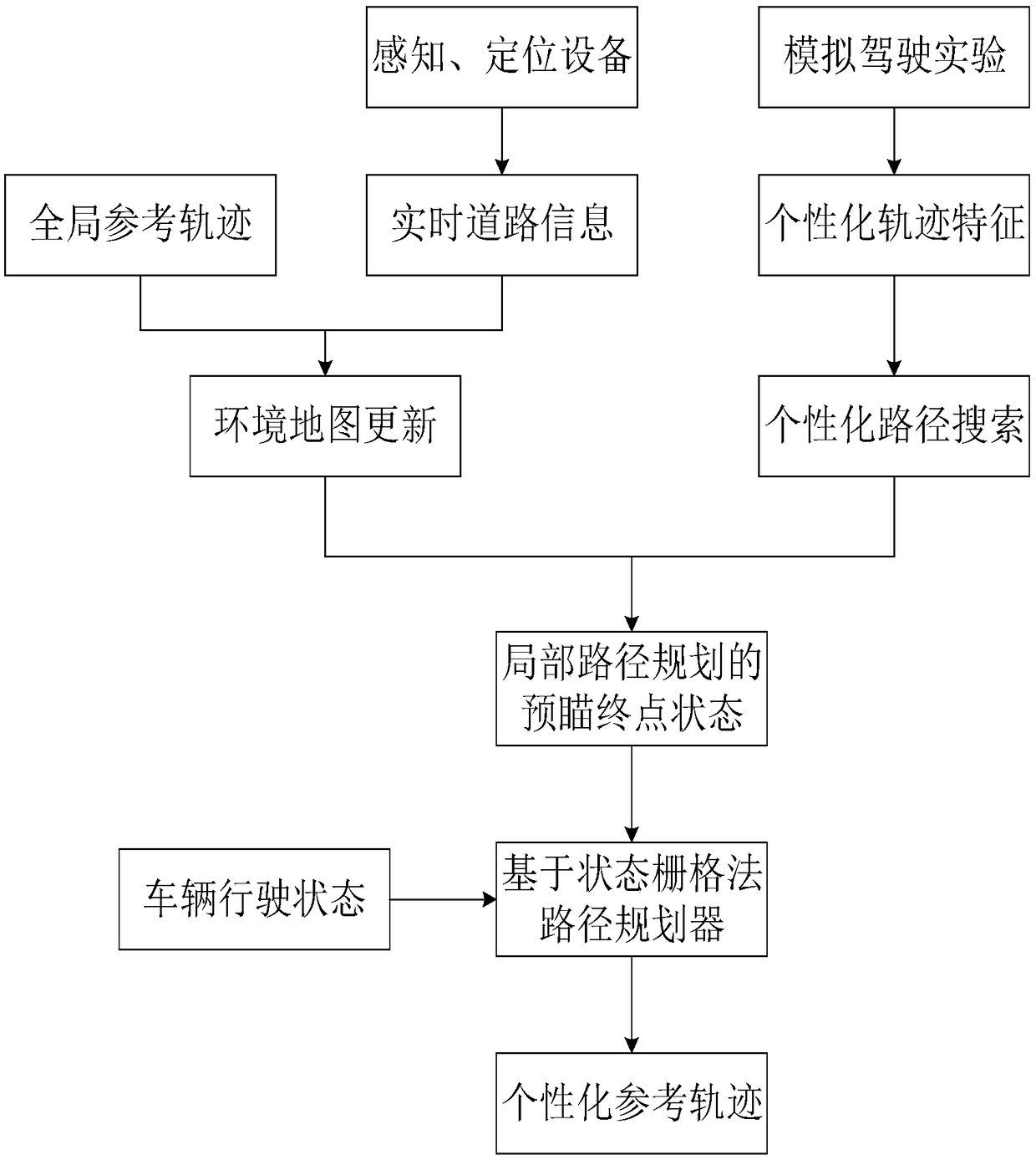
[0083] In the embodiment of the present invention, the method for generating a personalized reference trajectory for an autonomous vehicle should meet the following requirements:
[0084] First, the advantage of autonomous driving is to avoid the limitations of human perception and judgment, thereby reducing or even eliminating the occurrence of traffic accidents. This requires the path planning system to fully consider the influence of factors such as "people-vehicle-environment" security.
[0085] Second, different drivers have different driving skills, different driving experiences, and differe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More