Method for automatically driving vehicles along lane line based on program azimuth angle
An automatic driving and azimuth angle technology, applied in vehicle position/route/height control, two-dimensional position/course control, non-electric variable control, etc., can solve problems that do not conform to human driving habits, and achieve low cost and high efficiency Good, clear physical effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
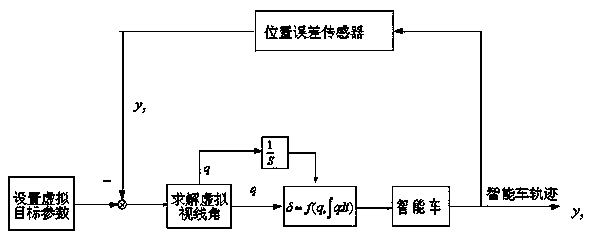
[0037] Example 1. A method for automatic driving of vehicles along lanes based on program azimuth angle, its principle refers to figure 1 , this method uses two position sensors installed on the front and rear bumpers of the vehicle to measure the deviation of the vehicle from the center line of the road, then sets the program moving target on the road center line, and finally calculates the positional relationship between the program moving target and the vehicle Program azimuth, which is similar to the aiming deviation angle calculated by the driver's brain during actual driving. Finally, according to the azimuth, a non-linear proportional integral combination method is used to obtain an automatic driving method for the vehicle to drive along the lane.
[0038] Step 1: Measure the position deviation of the vehicle from the centerline of the road
[0039] Two position sensors installed on the front and rear bumpers of the vehicle are used to measure the position deviation of...
Embodiment 2
[0055] Example 2. A method for automatically driving a vehicle along a lane line based on a program azimuth, the special feature of which is that the method uses two position sensors installed on the front and rear bumpers of the vehicle to measure the deviation of the vehicle from the center line of the road, and then sets the program The moving target is on the center line of the road, and finally the program azimuth is calculated according to the positional relationship between the program moving target and the vehicle. The non-linear proportional-integral combination method obtains the automatic driving method for the vehicle to travel along the lane.
[0056] Step 1: Measure the position deviation of the vehicle from the centerline of the road
[0057] Two position sensors installed on the front and rear bumpers of the vehicle are used to measure the position deviation of the vehicle's lateral position relative to the centerline of the road, and the deviation is recorded...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More