

Scene-based two-point non-uniform correction method
A non-uniformity correction and scene technology, applied in the field of infrared focal plane imaging, can solve the problems of high complexity and low correction accuracy, and achieve the effects of reasonable assumptions, improved image quality, and convenient engineering implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
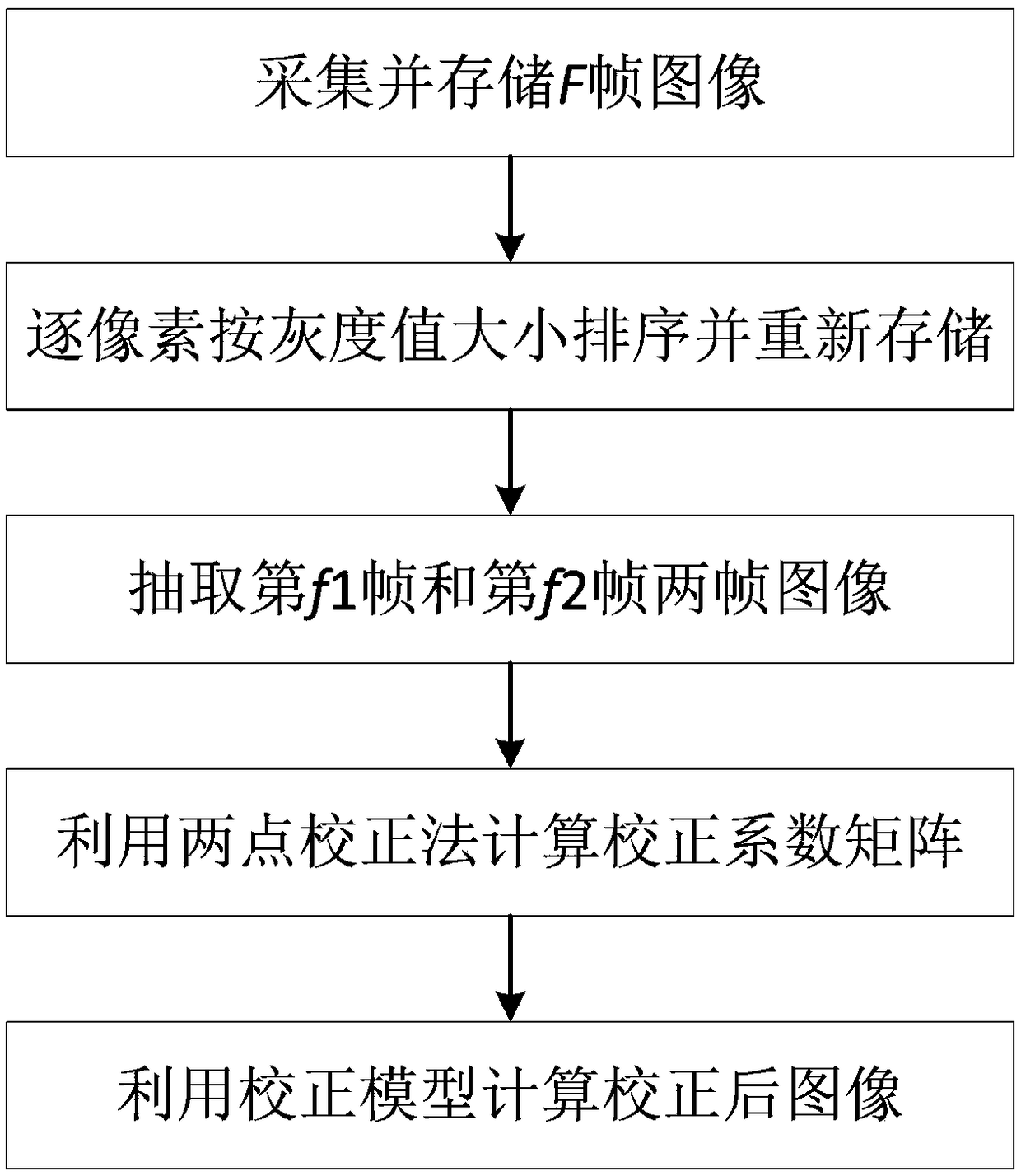
[0022] Specific implementation mode 1. Combination figure 1 Describe this embodiment, a scene-based two-point non-uniformity correction method, the method is implemented by the following steps:
[0023] Step 1. Maintain relative motion between the scene to be photographed and the LWIR detector, and collect and store F frames of the original image; relative motion between the scene to be photographed and the LWIR detector in any direction is acceptable, and there are many ways to generate relative motion: (1) It can be achieved by changing the azimuth, pitch or yaw angle, etc., and the movement speed is arbitrary; (2) Typically, for aerial cameras, the carrier aircraft can be controlled without changing the azimuth, pitch or yaw angle. Relative motion can be generated during flight.
[0024] Step 2, sorting the gray value of the collected F frame original image pixel by pixel, and storing the sorted F frame image;
[0025] Step 3. Randomly select the fth 1 frame and f 2 Fra...
specific Embodiment approach 2
[0049] Specific embodiment two, combine Figure 1 to Figure 9 This embodiment is described. In this embodiment, the scene-based two-point non-uniformity correction method described in Embodiment 1 is applied to a prototype. The principle prototype includes a cooled long-wave infrared detector produced by Sofradir and an optical lens with a focal length of 38mm. Among them, the resolution of the long-wave infrared detector is 320×256, the number of sampling bits is 14 bits, and the response band is 7.7-11.3 μm.
[0050] First, image the ground scene, continuously change the azimuth angle of the prototype at a speed of 5o / s, collect and store 1000 frames of original infrared images. Among them, the original image of the 200th frame is as figure 2 shown.
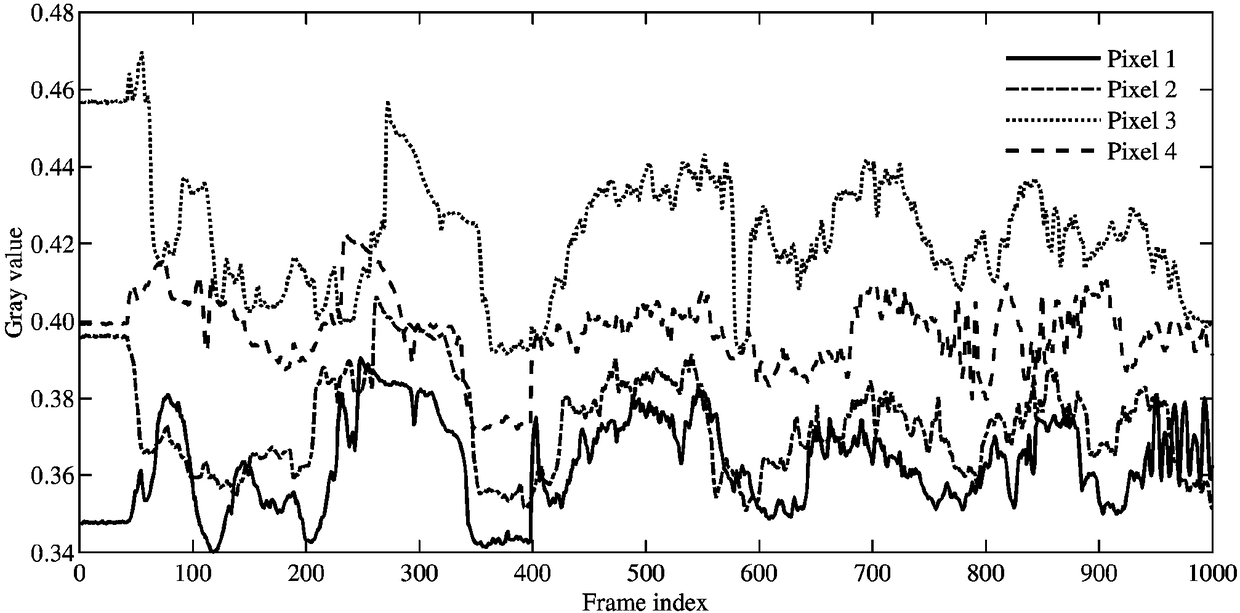
[0051] Second, sort by the gray value size pixel by pixel. Without loss of generality, four pixels are selected to analyze the algorithm principle and calculation process. The four pixels are (50, 240), (70, 220), (90, 20...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More