

Vision-based obstacle detection method, device, and mobile device
A technology of obstacle detection and mobile equipment, applied in the field of robotics, can solve problems such as reducing the service life of sweepers and affecting the accuracy of path planning, and achieve the effects of reducing design costs, avoiding contact detection, and improving reliability and detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
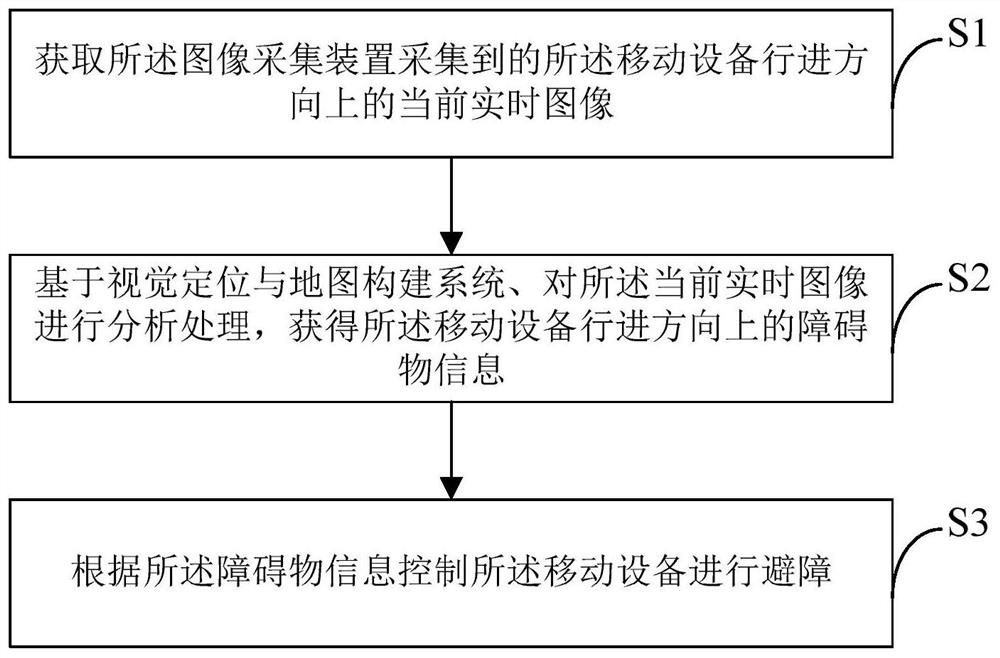
[0059] Specifically, such as figure 2As shown, the vision-based obstacle detection method of this embodiment includes the following steps:
[0060] Step S1. Obtain the current real-time image in the traveling direction of the mobile device collected by the image acquisition device.
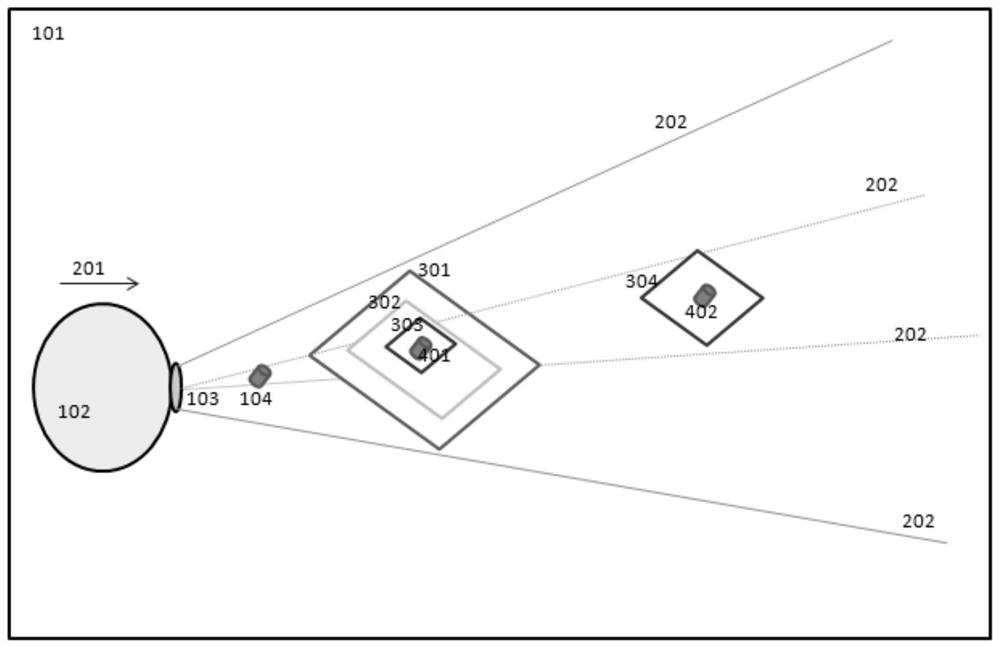
[0061] Taking the sweeper as an example, the moving direction of the mobile device is the moving track of the sweeper, and the monocular camera installed in the moving direction of the sweeper can collect images in real time in the moving direction.
[0062] Wherein, the current real-time image in the traveling direction of the mobile device is a real-time image collected by the image acquisition device at the current moment during the movement of the mobile device.
[0063] Step S2. Analyze and process the current real-time image based on the visual positioning and map construction system to obtain obstacle information in the traveling direction of the mobile device; the obstacle information is...
no. 2 example
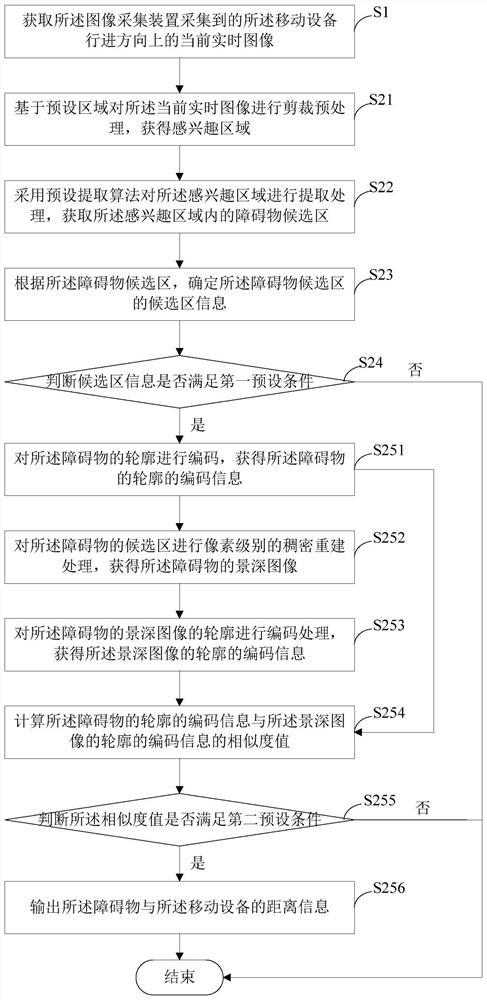
[0070] Such as image 3 As shown, the vision-based obstacle detection method of this embodiment includes the following steps on the basis of Embodiment 1:
[0071] Step S21 , performing clipping preprocessing on the current real-time image based on the preset region to obtain the region of interest.
[0072] Wherein, the preset area can be determined according to the conditions of the mobile device itself (such as the width of the mobile device) and the distance from obstacles.
[0073] By clipping and preprocessing the current real-time image to obtain the region of interest, the image processing data can be greatly reduced, the image processing rate can be improved, and the capability requirements for hardware devices can be reduced. For example, assume that the current real-time image is an image with a resolution of 640×480, and the preset area of the mobile device is 100×100 (that is, the mobile device only needs to determine the obstacles in the image with a resolutio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More