

A route planning method applied to underwater single-beacon navigation
A route planning and route technology, which is applied in navigation, surveying and navigation, navigation calculation tools, etc., can solve the problems that the navigation accuracy needs to be further improved, and the route planning method has not been proposed, so as to achieve the effect of improving the navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0058] Step 1: Based on the statistical partial differential matrix algorithm, calculate the horizontal position precision factor (Horizontal Dilution of Precision, abbreviated as HDOP) of the navigation scene, that is, the navigation precision distribution;
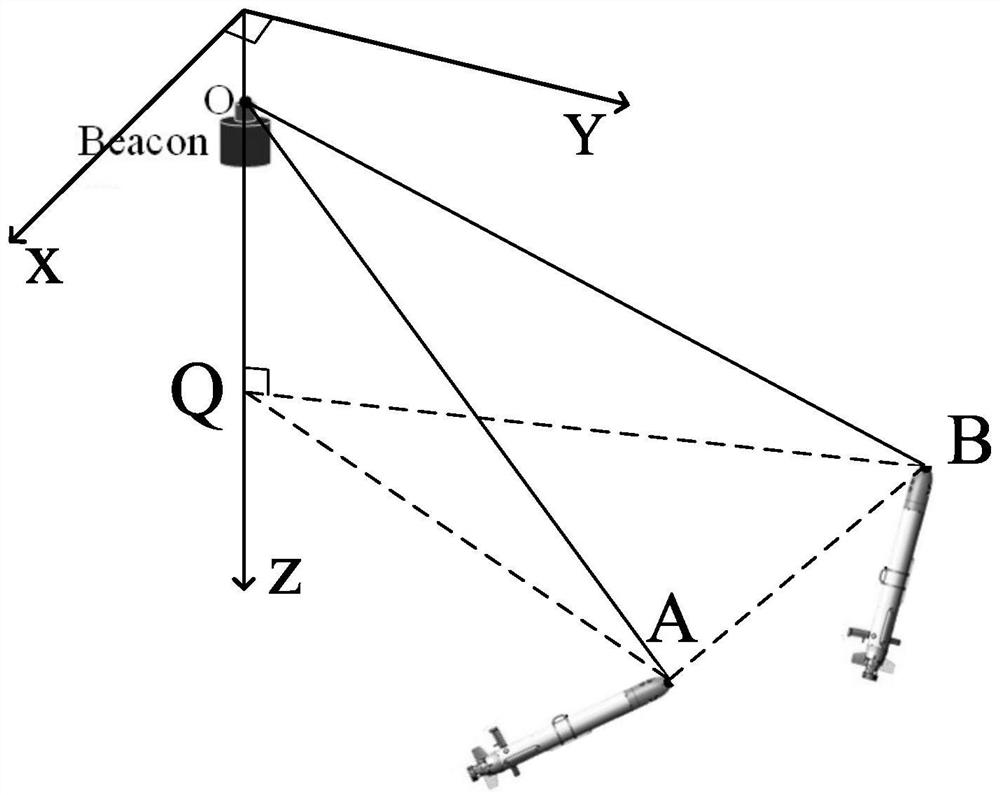
[0059] The environmental parameters are as follows: the standard deviations of TOA measurement error, beacon position error, sound velocity measurement error and INS error are 0.5ms, 1m, 1.5m / s and 0.1% respectively; the sound velocity c is 1500m / s; the XOY horizontal plane of the coordinate system is located at On the seawater surface, the positive direction of the z-axis is vertically downward, the acoustic beacon is located at (0,0,15), and the AUV is at the horizontal plane of z=75m.
[0060] Step 2: According to the HDOP distribution, combined with the directivity diagram of the acoustic beacon transmitting transducer and the sound propagation loss, determine the optimal route radius and obtain the optimal route
[...
Embodiment 2
[0067] A route planning method applied to underwater single-beacon navigation, comprising the following steps:
[0068] (1) Calculate the horizontal position precision factor of the navigation scene;
[0069] (2) According to the distribution of the precision factor of the horizontal position, combined with the directivity diagram of the acoustic beacon transmitting transducer and the sound propagation loss in sea water, the optimal route radius is determined and the optimal route is obtained;
[0070] (3) According to the distribution of the horizontal position precision factor and the optimal route, optimize the navigation point and determine the position of the navigation point.
[0071] In step (1), the specific process of calculating the horizontal position precision factor distribution of the navigation scene based on the statistical partial differential matrix algorithm is as follows:
[0072] (1.1) The coordinates of points A and B are X A =(x A ,y A , z) and X B ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More