

Full-digital simulation method and device for global positioning system (GPS)/strapdown inertial navigation system (SINS) combined navigation
A technology of all-digital simulation and integrated navigation, applied in the field of full-digital simulation of GPS/SINS integrated navigation, which can solve the problems of restricting the popularization and application of GPS/SINS integrated system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
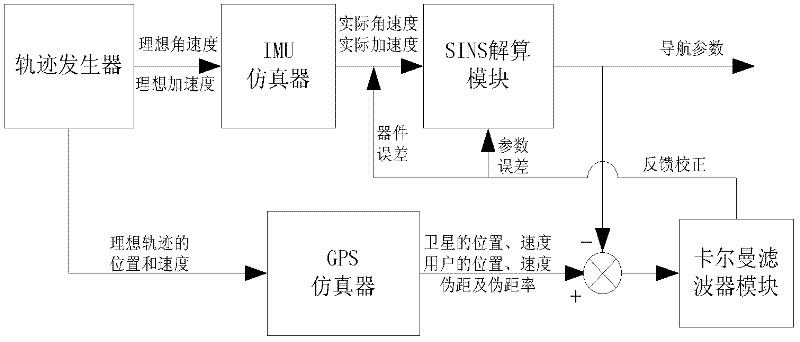
[0040] The purpose of the present invention is to provide a full digital simulation system of GPS / SINS integrated navigation system. The simulation system can replace the actual GPS / SINS integrated navigation system to verify the influence of various software algorithms in integrated navigation on navigation accuracy and develop new algorithms; at the same time, these verified algorithms and new developed algorithms can be loaded It is applied in the actual GPS / SINS integrated navigation system; the present invention has an important guiding function and practical significance on how to improve the navigation accuracy of the low-cost GPS / SINS integrated navigation system. The present invention mainly completes the following functions:
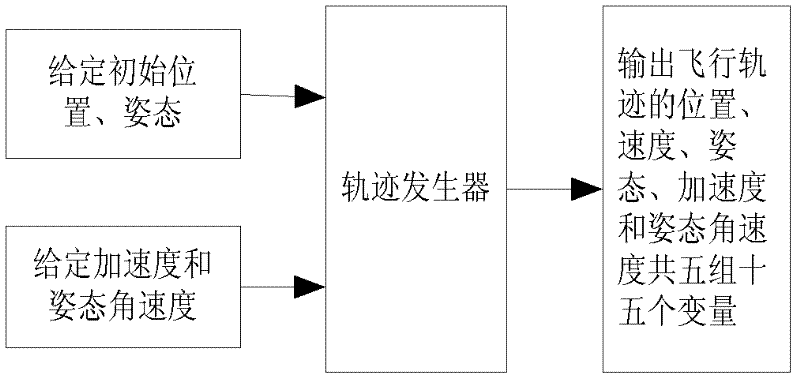
[0041] 1. The trajectory generator provides the flight trajectory data required by the entire integrated navigation simulation system.
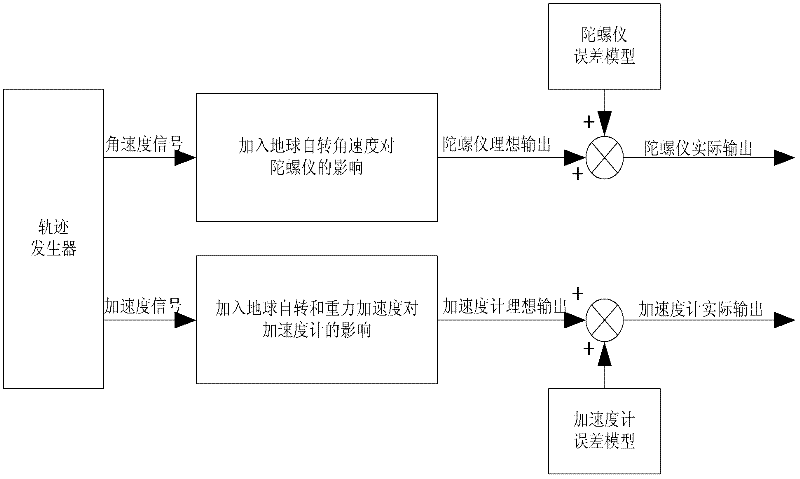
[0042] 2. The IMU emulator simulates the real output of the gyroscope and accelerometer.
[0043] 3. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More