

Error restraining method for fiber-optic gyroscope strapdown inertial navigation system rotating relative to geocentric inertial system
A strapdown inertial navigation and fiber optic gyroscope technology, which is applied to navigation, instruments, and measuring devices through speed/acceleration measurement, and can solve problems such as the inability to suppress the influence of system navigation accuracy and the inability to eliminate the influence of gyroscope system navigation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
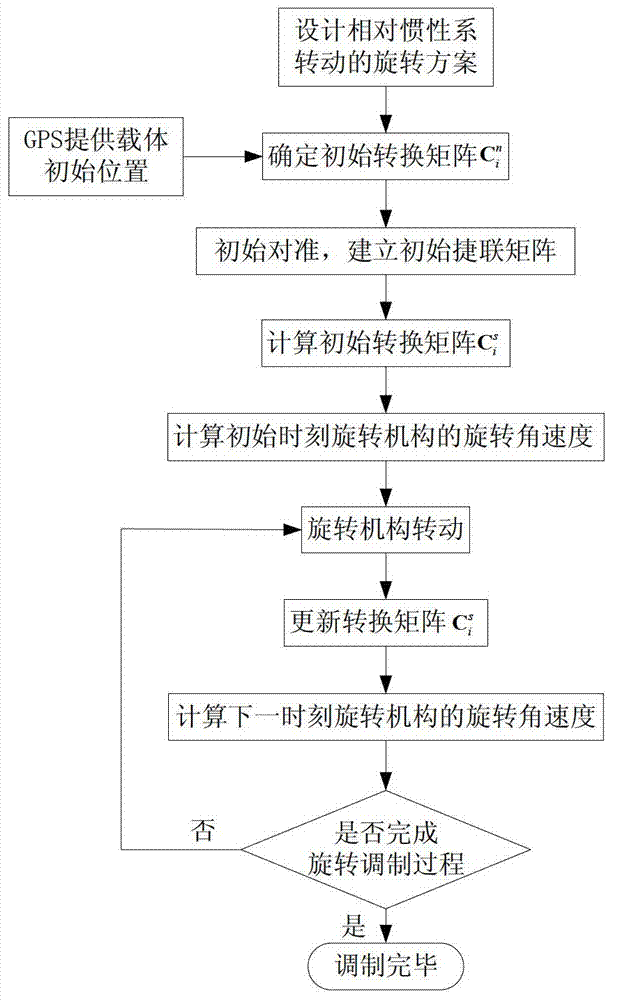
[0040] The present invention provides an error suppression method for an optical fiber gyro strapdown inertial navigation system that rotates relative to the earth-centered inertial system. The flow chart is as follows figure 1 As shown, the described error suppression method is realized through the following steps:
[0041] The first step is to design the four-position and eight-sequence rotation scheme of the strapdown inertial navigation system relative to the earth-centered inertial system before system navigation.
[0042] The rotation scheme of the IMU using four positions and eight rotations as a rotation cycle is:
[0043] Sequence 1, IMU starts from position A and circles oz i The shaft rotates 360° in the positive direction, and the rotational angular velocity ω bs i = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More