

Online calibrating method of ship-based rotary strapdown inertial navigation system
A technology of strapdown inertial navigation and inertial navigation system, which is applied in the field of online calibration of shipborne rotary inertial navigation system, can solve problems such as affecting the accuracy of online calibration, poor robustness, and filter divergence, and achieves compensation for parameter errors without linearization. , the effect is not easy to spread
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0230] During the online calibration process of shipborne rotary strapdown inertial navigation system, due to the influence of waves, sea wind and other disturbances, the system model is uncertain, which will lead to the problems of filter divergence, low precision and poor robustness, which seriously affect the online calibration accuracy. The proposal of the strong tracking volumetric Kalman filter can effectively solve the above problems. Therefore, the research on the online calibration method of the shipborne rotary strapdown inertial navigation system based on the strong tracking volumetric Kalman filter is of great significance.
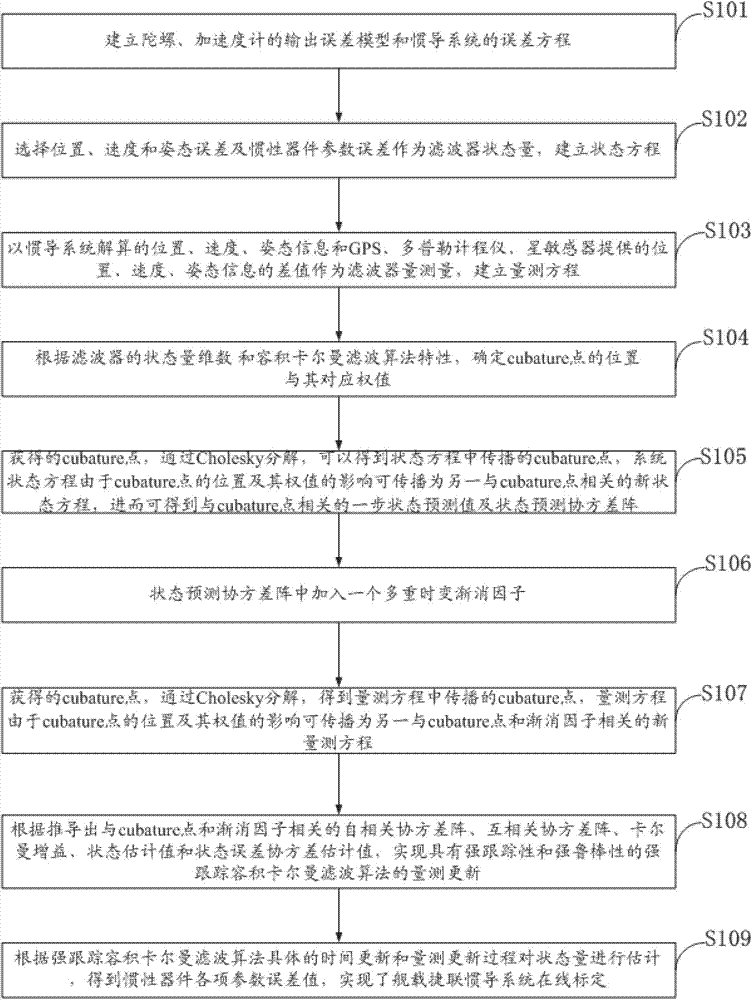
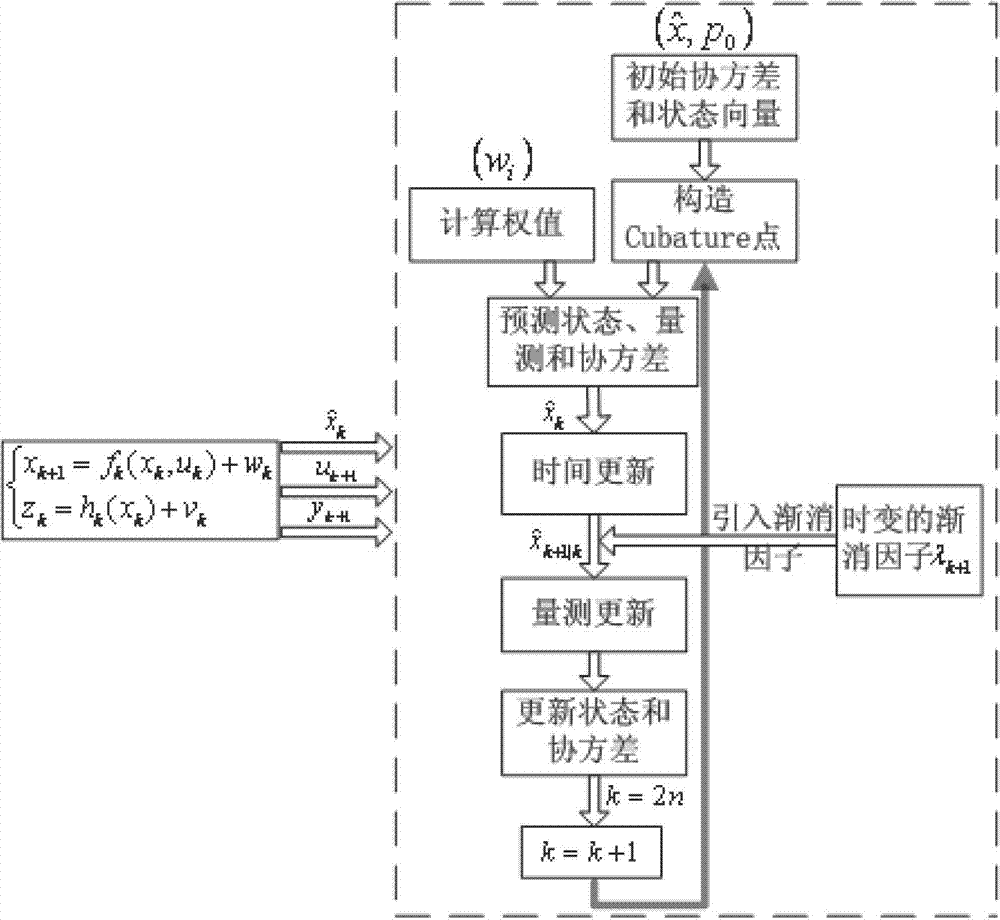
[0231] The present invention comprises the following steps:
[0232] Step 1: Considering that there are many state variables to be estimated in the online calibration of the shipborne rotary SINS, and the system dimension is large, the real-time processing of data is limited by the capability of the navigation computer. Therefore, in the proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More