

Robust Quadrotor Trajectory/Attitude Composite Anti-jamming Tracking Control Method Based on Adaptive Integral
A tracking control and tracking controller technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve problems such as insufficient robustness of control performance, and achieve reduction of conservatism, high-precision tracking control, improvement of The effect of anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described below in conjunction with specific embodiments and accompanying drawings.
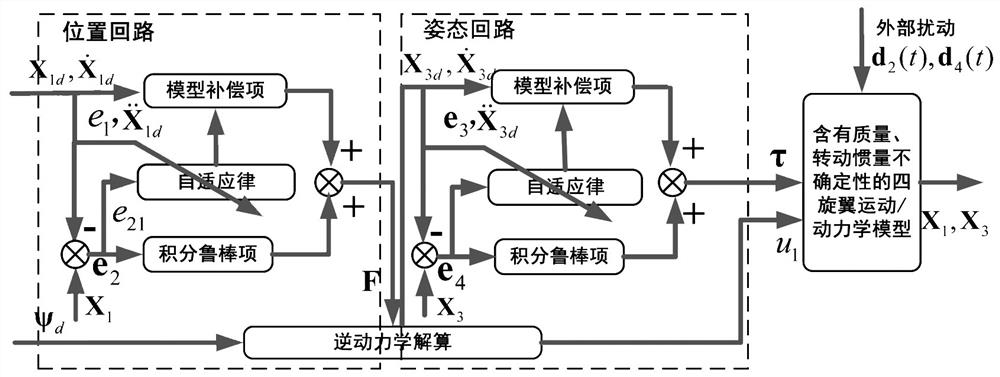
[0040] A robust four-rotor trajectory / attitude compound anti-jamming tracking control method based on adaptive integration, such as figure 1 shown, including the following steps:
[0041] (1) Establish a quadrotor motion / dynamics vectorization model considering parameter uncertainties and external disturbances. The quadrotor motion / dynamics vectorization model is:
[0042]
[0043] Among them, X 1 =[X 11 ,X 12 ,X 13 ] T 、X 2 =[X 21 ,X 22 ,X 23 ] T is the position vector and velocity vector of the quadrotor in the inertial coordinate system; X 1 , X 2 The initial value of X 1 =[0,0,0] T m, x 2 =[0,0,0] T m / s, m is the mass of the quadrotor; Π 1 =diag(k x ,k y ,k z )∈R 3×3 is the aerodynamic damping matrix, k i (i=x,y,z) is the aerodynamic damping coefficient; F=g 1 u 1 -G,u 1 is the sum of the lift generated by the four...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More