

Unmanned surface vehicle preset performance tracking control method based on RISE technology
A technology of preset performance and tracking control, which is applied in two-dimensional position/course control and other directions, and can solve problems such as error and model parameter uncertainty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
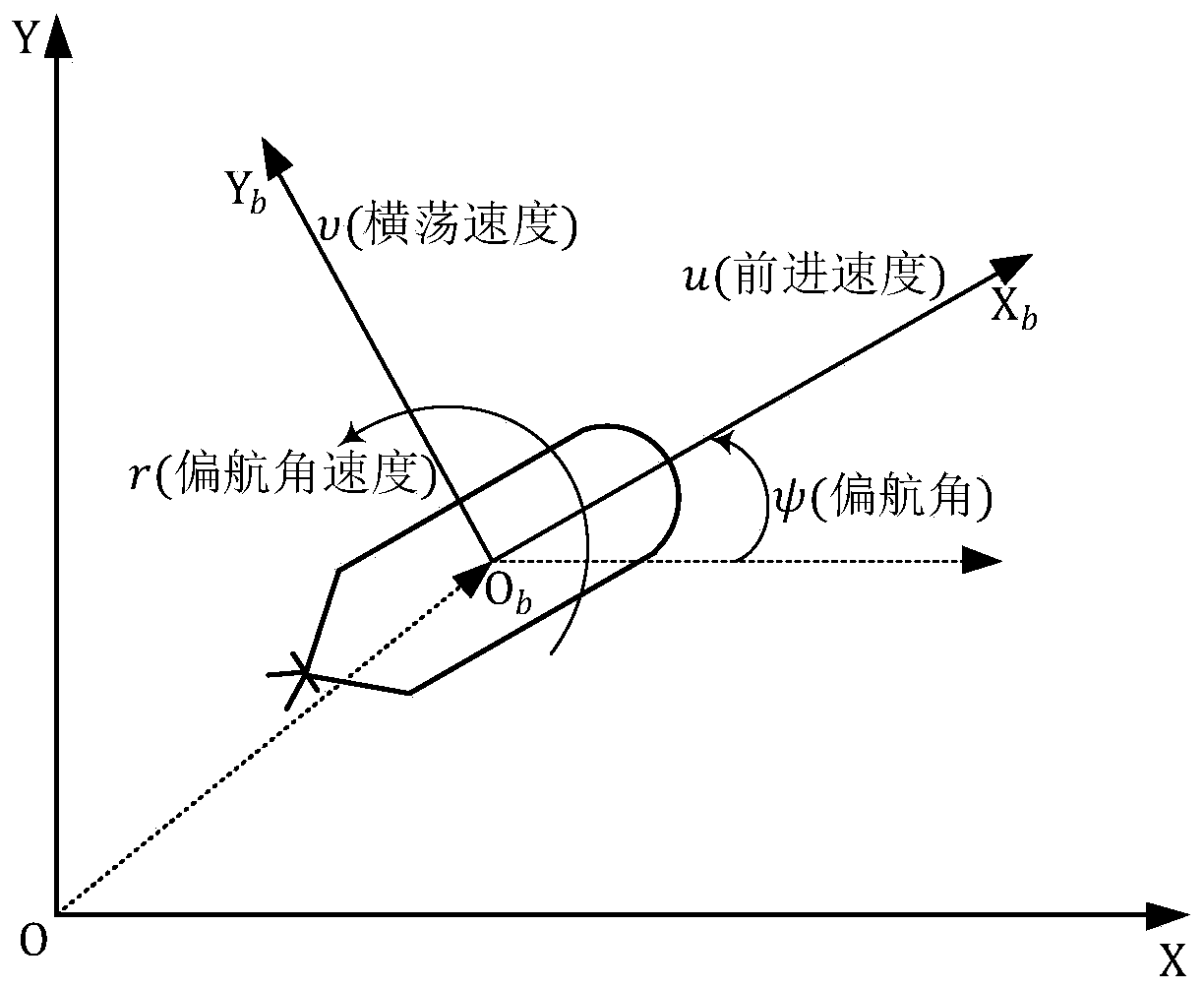
[0062] This example is aimed at figure 1 The unmanned surface vehicle system shown adopts the adaptive feed-forward control strategy based on RISE technology to compensate for system uncertainty and external unknown disturbances, where XOY represents the earth coordinate system, and X b o b Y b Indicates the unmanned surface hull coordinate system.
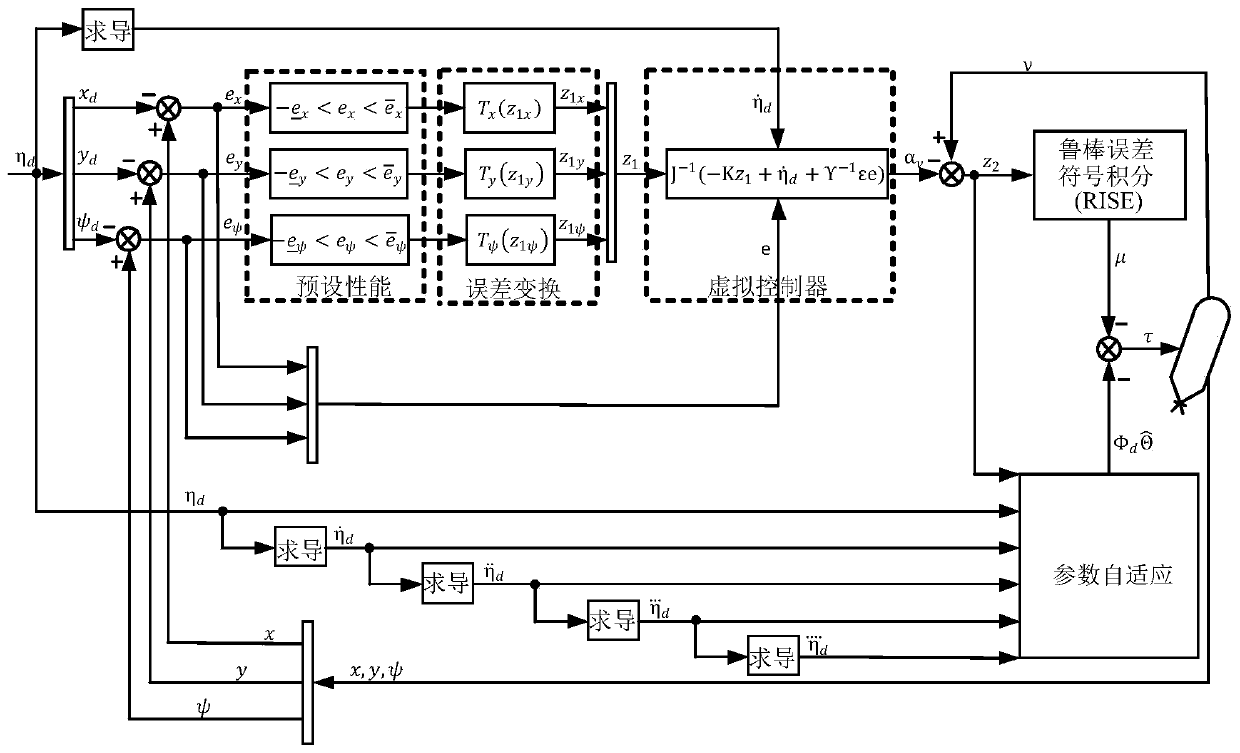
[0063] figure 2 A method for tracking and controlling the preset performance of unmanned surface vehicles based on RISE technology is demonstrated, including the following steps:
[0064] Step (1): Establish the dynamic mathematical model of the unmanned surface vehicle, specifically:
[0065]
[0066] where, η = [x, y, ψ] T Represents the position and yaw angle output of the unmanned surface vehicle, x represents the abscissa of the geodetic coordinate, y represents the ordinate of the geodetic coordinate, ψ represents the yaw angle, is the time derivative of η; ν=[u, υ, r] T Indicates the speed of the unmanned surfac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More