

Lane Keeping Method Based on Preview Point and Its Assisting System
A lane keeping and preview technology, applied in vehicle components, instruments, calculations, etc., can solve the problem of unstable vehicle driving direction control, and achieve the effect of stable and reliable lane keeping control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
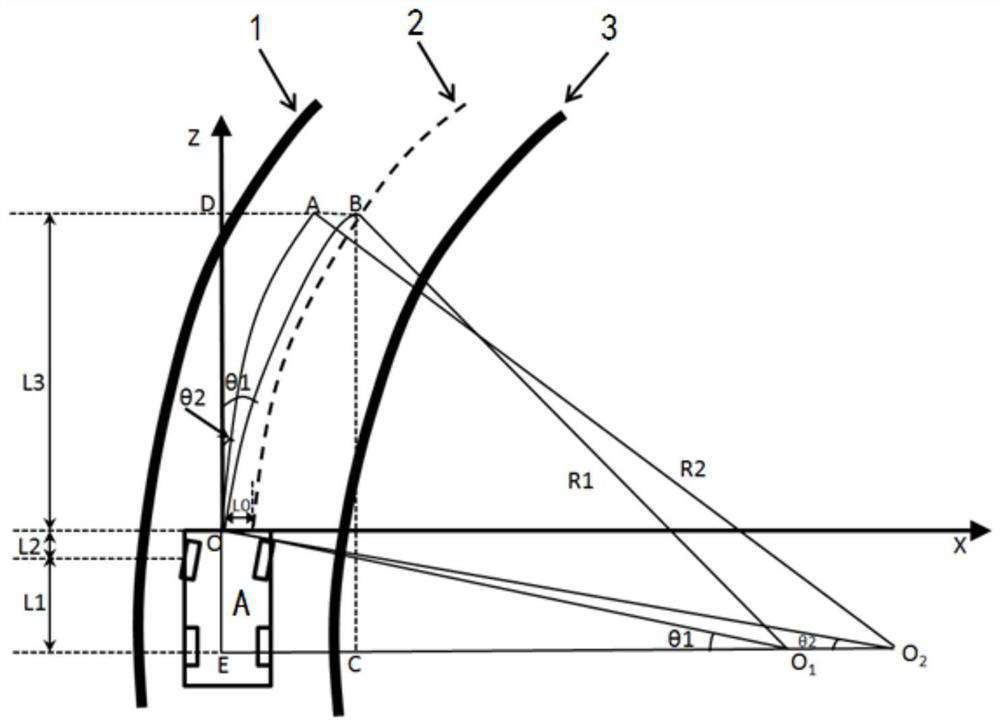
[0039] Such as figure 1 The vehicle coordinate system established as shown, the vehicle coordinate system takes the set point on the front of the vehicle as the origin, takes the forward direction of the vehicle as the positive direction of the vertical axis, and takes the perpendicular direction of the vehicle to the right as the positive direction of the horizontal axis; under this coordinate system The equations of the left and right lane lines are established, and the lane centerline equation is calculated accordingly, and the lane centerline equation is used as the target trajectory of the vehicle.
[0040] A is a vehicle, 1 is the left lane, 2 is the center line of the lane, that is, the target trajectory, and 3 is the right lane, select a preview point B on the center line of the lane, and set the coordinates of point B as (x, z); L1 is the front and rear wheels of the vehicle L2 is the length of the front overhang of the vehicle, L3 is the ordinate z of the preview poi...
Embodiment 2
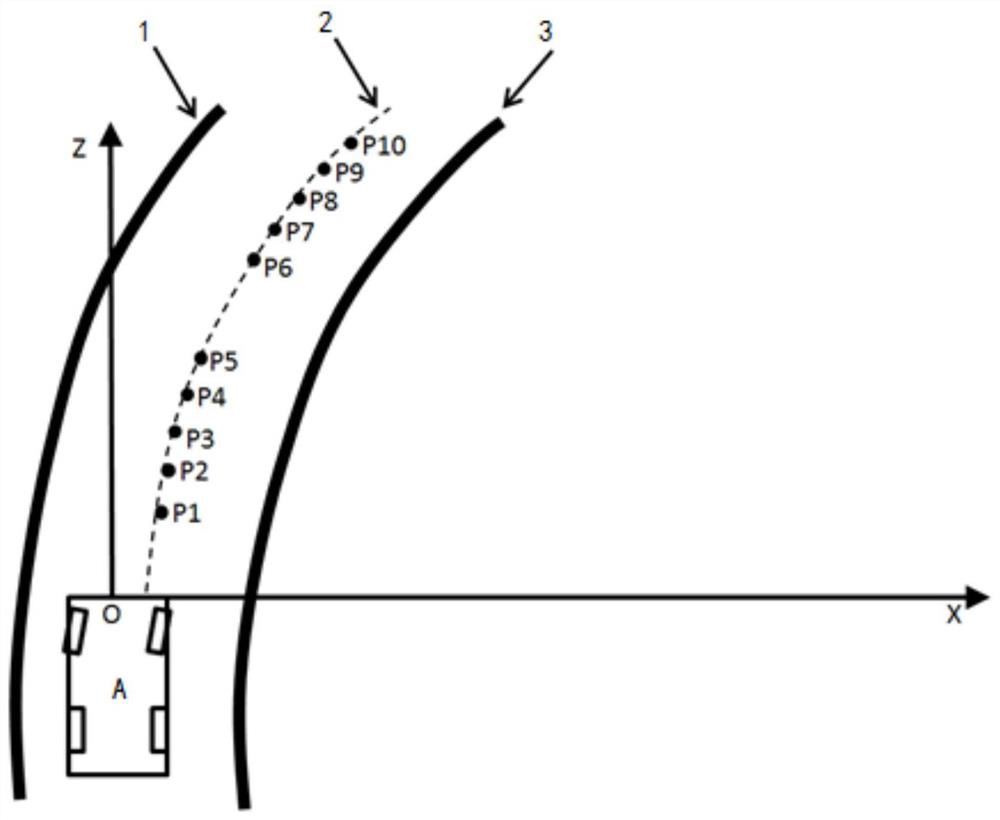
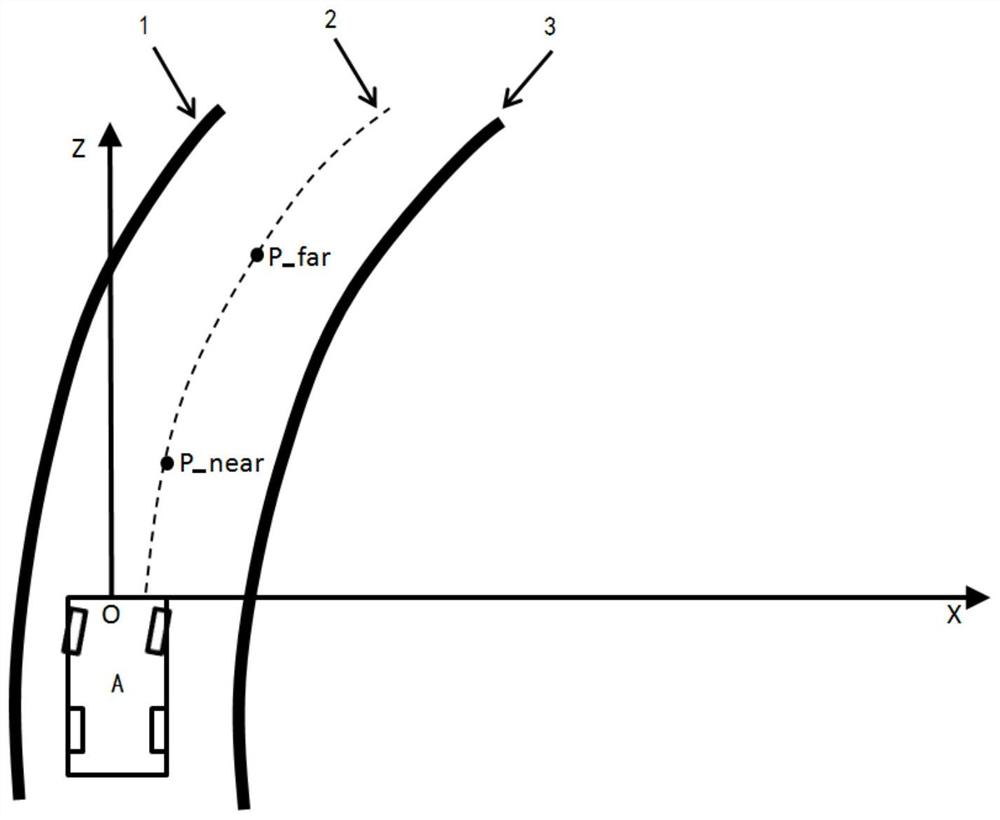
[0048] Embodiment 1 is based on the corner control amount calculated based on a specific preview point (single preview point), in order to improve the detection accuracy and vehicle driving stability, and avoid the phenomenon of "drawing dragons" easily caused by the instability of a single preview point, Two or more preview points with a set distance apart can be selected. Embodiment 2 provides a specific solution for selecting two preview points, including two steps.
[0049] The first step: if figure 2 As shown, A is the vehicle, 1 is the left lane, 2 is the center line of the lane, that is, the target trajectory, and 3 is the right lane. Take 5 preview points on the center line of the lane away from the set distance of the vehicle and close to the set distance of the vehicle. , where P1-P5 is a short-range preview point, and the ordinates of P1-P5 form an arithmetic sequence; P6-P10 is a long-distance preview point, and the ordinates of P6-P10 form an arithmetic sequence;...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More