

Control method and system for autonomous driving vehicles
A technology of automatic driving and control method, which is applied to the traffic control system, traffic control system, arrangement situation and other directions of road vehicles, and can solve the problems of many traffic scene factors, parking disorder, interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
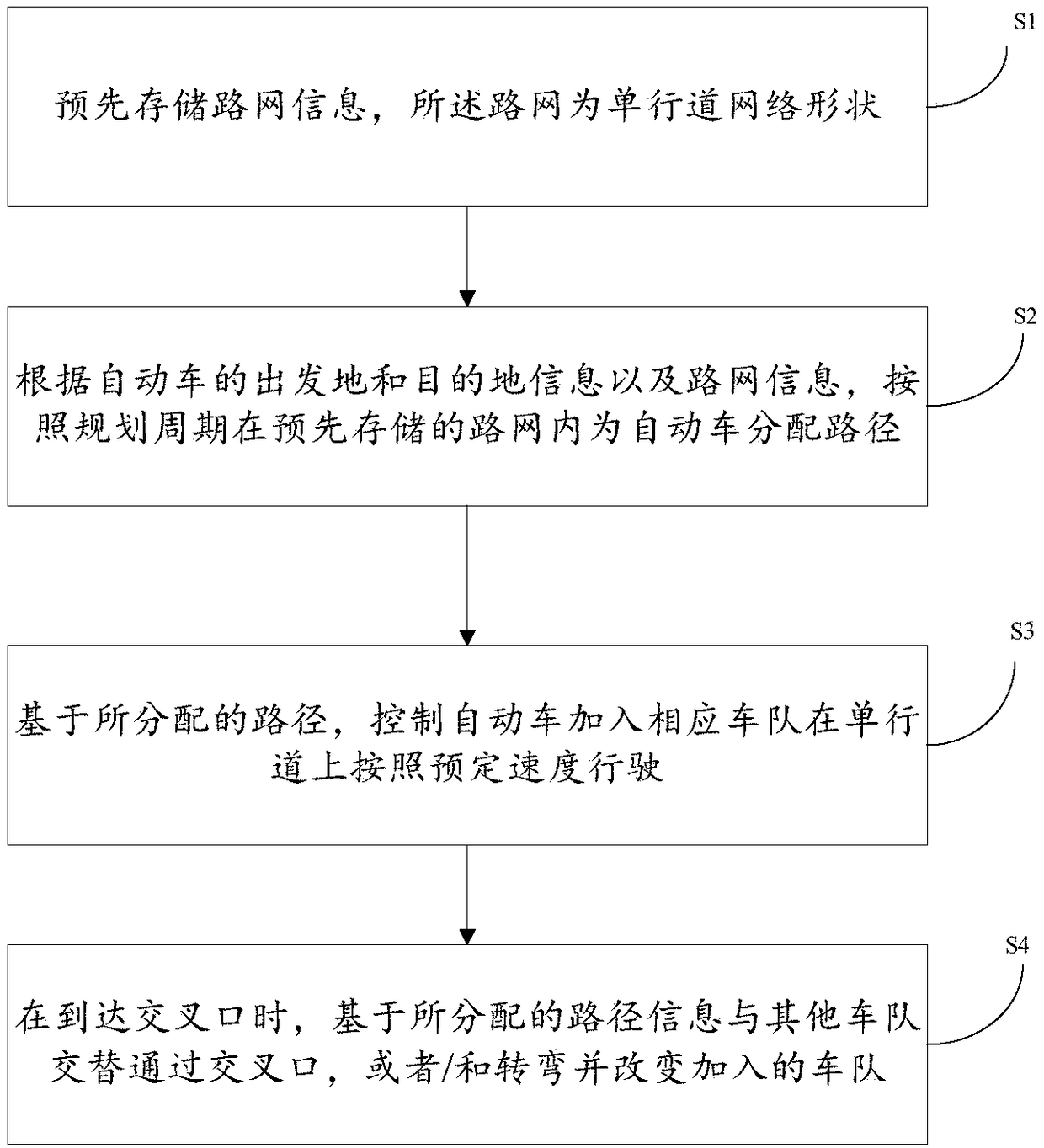
[0067] As a specific implementation manner, the path allocation unit specifically includes:
[0068] The acquisition module is used to acquire the set of starting point-destination point pairs of each automatic vehicle;
[0069] The calculation module is used to calculate the optimal path based on the starting point-destination point pair, according to the length of the planning cycle, the travel time of the shortest path, the capacity of the vehicle fleet, the number of vehicles waiting to enter the planning cycle, and the number of vehicles on the path.
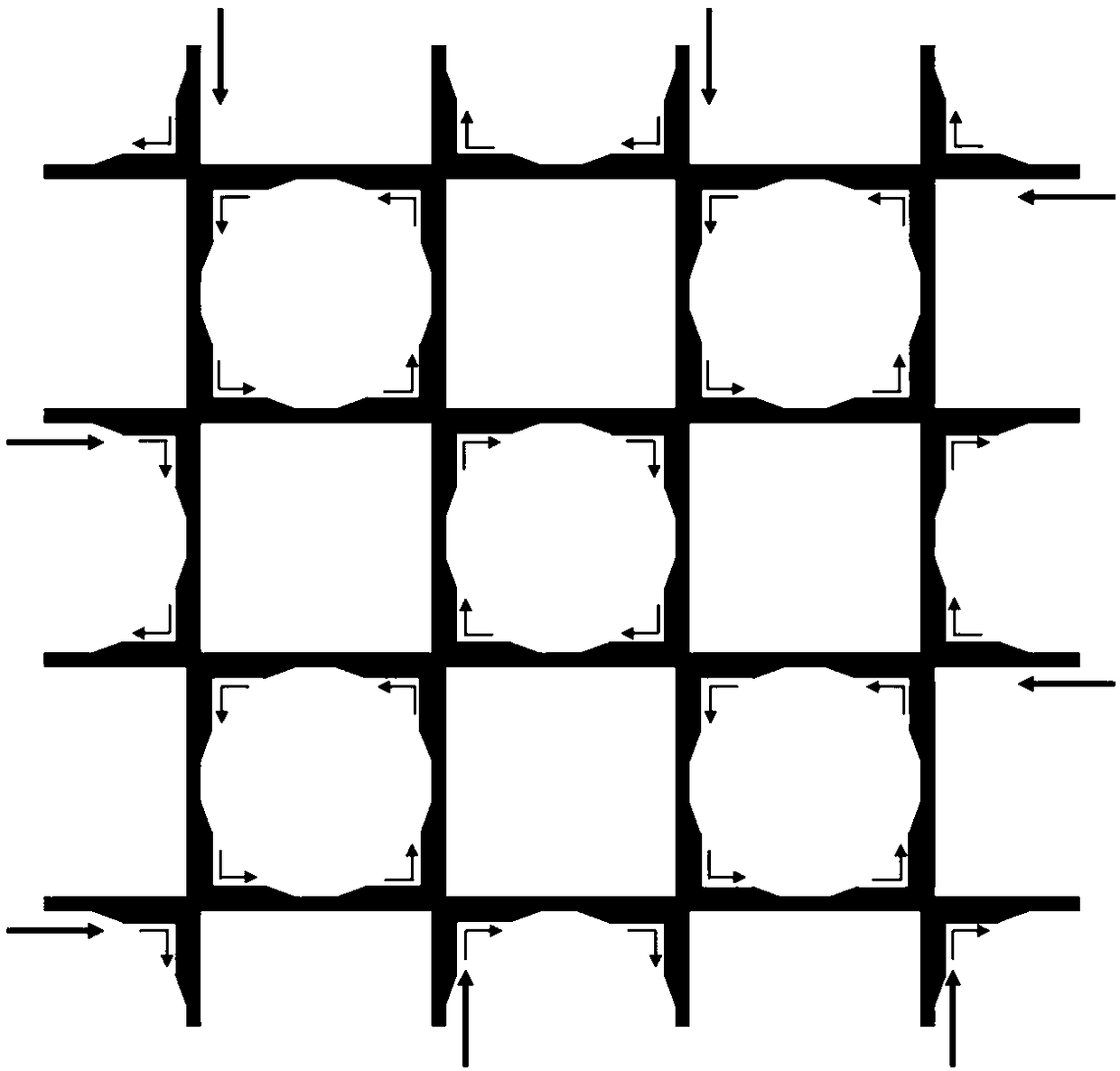
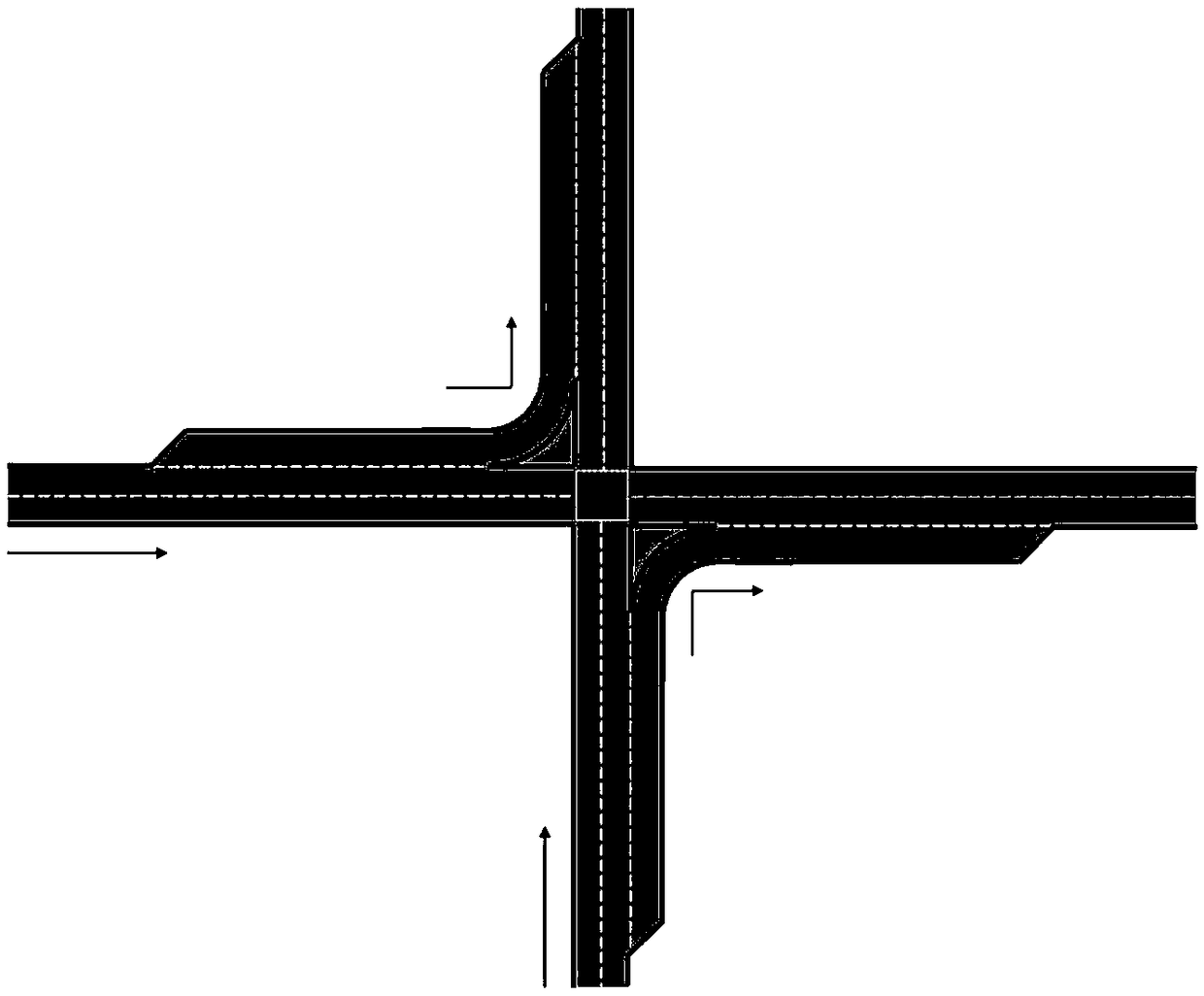
[0070] The method and system proposed by the present invention do not need to set signal lights on the road, and all the self-driving vehicles are dynamically allocated to each fleet through the cloud real-time control strategy, and move at a preset speed curve, which can realize efficient and safe passage of the entire road network.
[0071] The present invention innovatively combines the advantages of automatic driving te...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More