

Robot and power-off compensation method thereof, device with storage function
A storage function, electrical compensation technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as damage, impact on user use, bearing wear, etc., to reduce wear, improve stability, and avoid continuous accumulation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
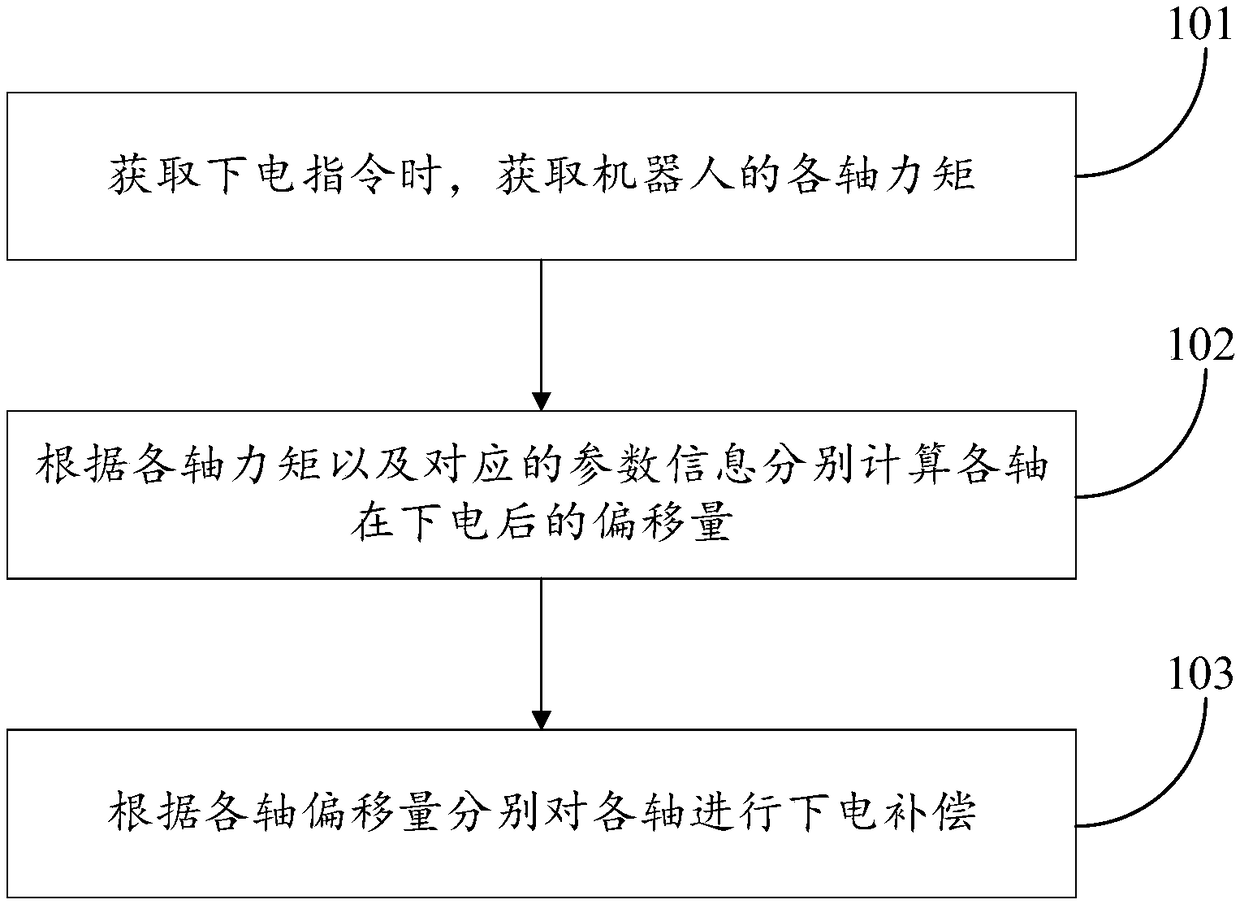
[0013] see figure 1 , figure 1 It is a schematic flow chart of an embodiment of the method for power-off compensation of a robot in the present invention. The method for power-off compensation of a robot in this embodiment includes the following steps:
[0014] 101: When receiving the power-off command, obtain the torque of each axis of the robot;
[0015] Specifically, the robot processor acquires a power-off instruction. In this embodiment, the power-off instruction is a one-time power-off instruction, and the one-time power-off instruction releases various drives outside the control circuit. Load the calculation module according to the power-off command to obtain the gravity value of each axis body, the gravity value of the load of each axis body, the centrifugal force value of each axis, the Coriolis force value of each axis, the inertial force value of each axis and the Friction value, finally, after the above-mentioned values are summed up and calculated (specifical...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More