

Multi-area classified unmanned aerial vehicle formation route planning method based on distributed control
A distributed control and path planning technology, applied in non-electric variable control, control/regulation systems, three-dimensional position/channel control, etc., can solve the problems of difficulty in controlling the flexibility and accuracy of UAV formation paths, and achieve faster planning. effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
[0032] In an embodiment of the present invention, a distributed control-based multi-region hierarchical UAV formation path planning method is provided, which specifically includes steps:
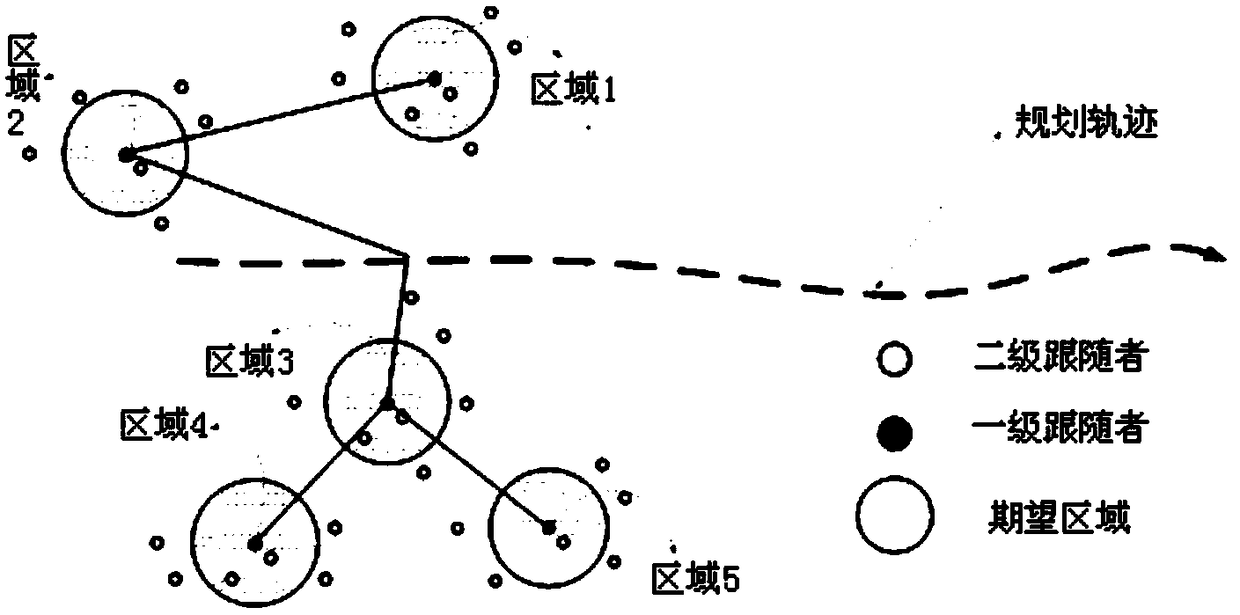
[0033] S1. Establish a UAV multi-region and multi-level control formation network framework: for details, please refer to figure 1 , the present invention evenly divides the UAV formation into a specified number of areas, sets a virtual leader aircraft in each area, and sets all the remaining UAVs in the area as member aircraft, and combines the virtual The leading machine forms the leading layer, and the member machines in each area are combined to form the regional member aircraft layer, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More