

A Torque Compensation Control Method for Industrial Robots Based on Load Adaptive Identification
A self-adaptive identification, industrial machine technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as reduced control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0108] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0109] It should be pointed out that those skilled in the art can make some improvements and modifications without departing from the principle of the present invention, and these improvements and modifications should also be regarded as the protection scope of the present invention. All components that are not specified in this embodiment can be realized by existing technologies.
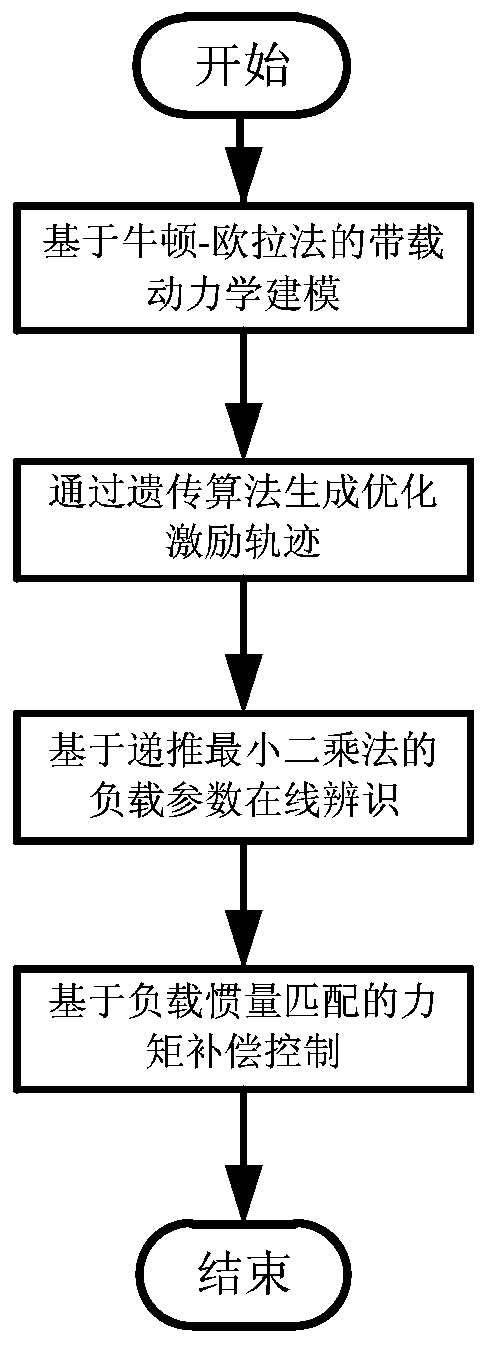
[0110] Such as figure 1 As shown, an industrial robot torque compensation control method based on load adaptive identification includes the following steps:
[0111] (1) Robot dynamics modeling under load conditions
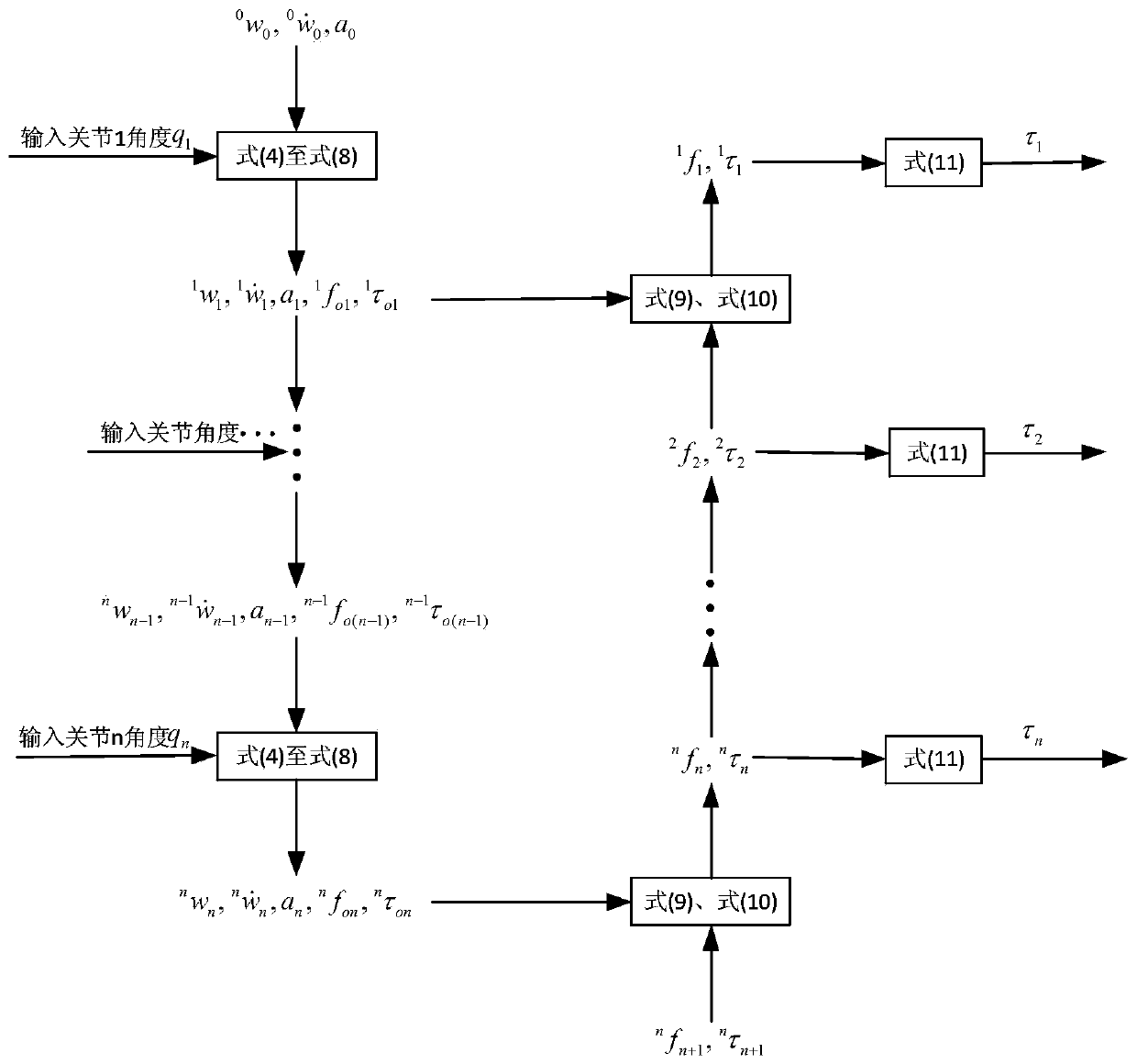
[0112] According to the overall force balance analysis of the robot, the Newton-Euler method is used to deduce and establish the robot dynamic model under the load condition on the basis of considering the friction. Specif...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More