

Auv Motion Control Method Based on Finite Time Extended State Observer
An expanded state, finite time technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problem that the disturbance estimation error of expanded state observer does not have finite time convergence characteristics, and achieve good disturbance estimation accuracy , the effect of strong robustness and good finite-time convergence characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
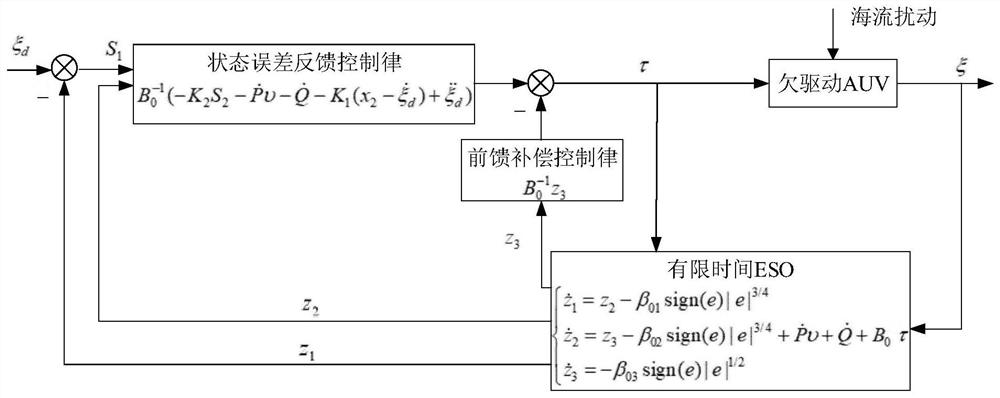
[0082] Attached below figure 1 The present invention is further described.
[0083] Such as figure 1 As shown, a AUV motion control method based on a finite time dilation state observer includes the following steps:
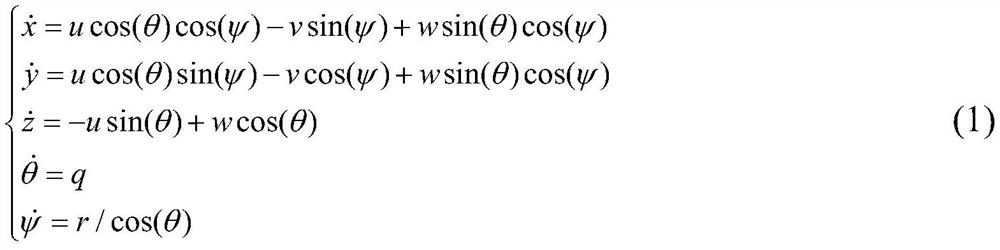
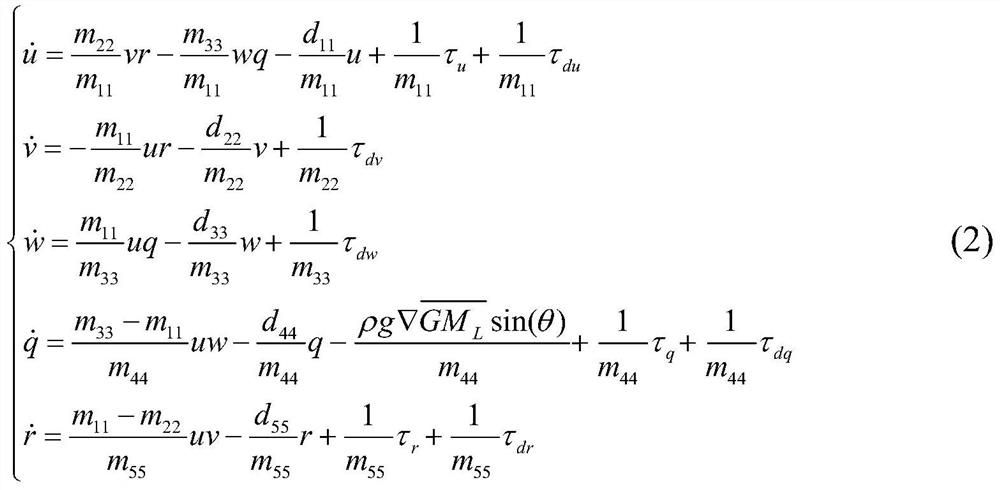
[0084] A. Consider the dynamic uncertainty in the AUV state space expression (7) and the disturbance uncertainty caused by the ocean current to the AUV as a three-dimensional total disturbance vector d, the actual position of the front end of the underactuated AUV of the controlled object is the output ξ of the AUV, and the state space expression (7) of the AUV is expanded to the motion mathematical model shown in the formula (8);
[0085] B. Design a finite time expansion state observer; the finite time expansion state observer obtains the AUV motion state x according to the control input τ and output ξ of the AUV 1 、x 2 The estimated z 1 ,z 2 and an estimate of the total disturbance z 3 ;
[0086] C. Design AUV motion compound control law based on exte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More