

AUV motion control method based on finite-time extended state observer
An extended-state, finite-time technology, which is applied in adaptive control, general control systems, control/regulation systems, etc., can solve the problem that the disturbance estimation error of the extended state observer does not have finite-time convergence characteristics, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
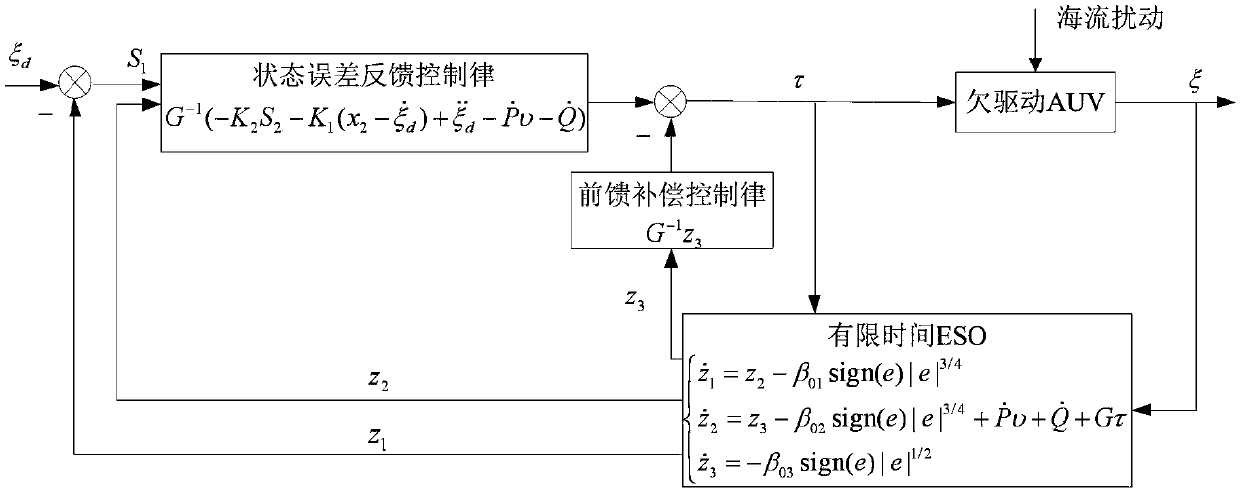
[0082] Attached below figure 1 The present invention is further described.
[0083] Such as figure 1 As shown, the working principle of the under-driven AUV three-dimensional motion control method based on the finite-time extended state observer is: the under-driven AUV is the controlled object and is affected by the ocean current disturbance. Its output signal ξ is the actual position of the front end of the AUV; AUV The input and output signals are the input of the finite-time extended state observer, and the finite-time extended state observer obtains the AUV motion state x according to the input τ and output ξ of the AUV 1 , X 2 Estimate of z 1 ,z 2 And an estimate of the total disturbance z 3 ; AUV's motion state x 1 Estimate of z 1 Is fed back to the reference input terminal of the AUV and matches the expected output signal ξ of the AUV d Compare, form deviation signal S 1 , Passed to the AUV state error feedback control law; AUV motion state x 2 Estimated value of z 2 Fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More