

A Robust Fault Tolerant Control Method for Underactuated Underactuated Underwater Robot Actuator Faults
A fault-tolerant control and fault-robust technology, applied in the direction of adaptive control, general control system, control/regulation system, etc. Under the robot's underactuated characteristics, the actuator fails and other problems, and achieves good adaptive ability and robustness, simplifies the control law, and improves the reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below in conjunction with the accompanying drawings.
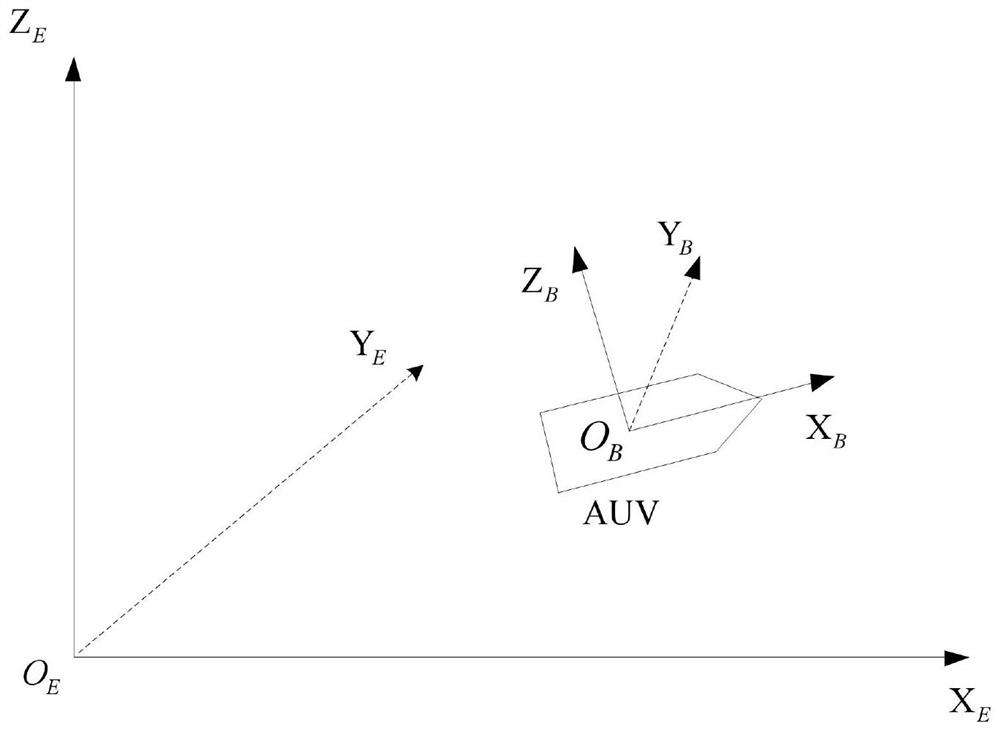
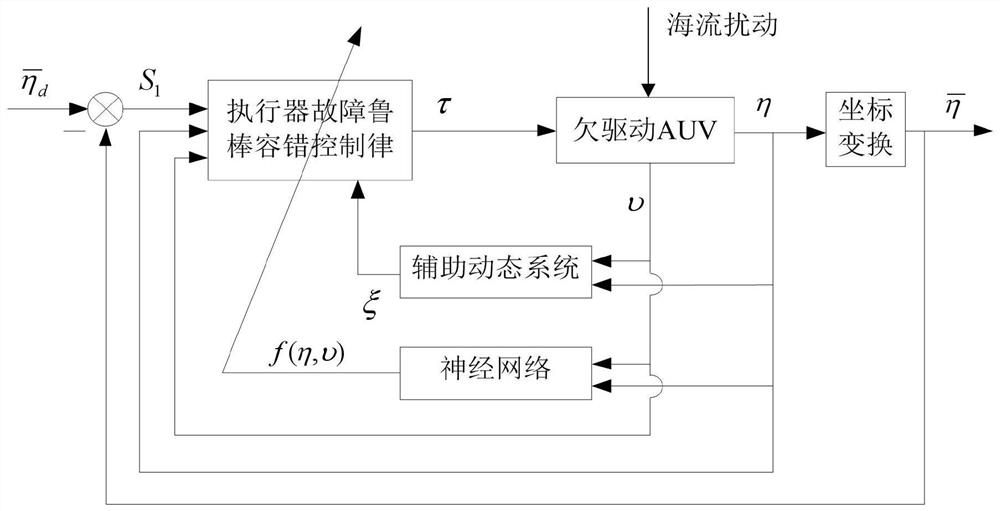
[0071] Such as Figure 1-2 As shown, the principle of the underactuated AUV actuator failure robust fault-tolerant control method is as follows: the underactuated AUV is the controlled object, which will be affected by the disturbance of the ocean current; the output signal of the AUV is the pose vector η in the geodetic coordinate system, after coordinate transformation , converted to the actual position of the front end in the AUV geodetic coordinate system The actual position of the front end of the AUV Feedback to the AUV's reference input and with the AUV's desired position compared to form the deviation signal S 1 ; The auxiliary dynamic system generates the state vector ξ according to the control input τ, the pose vector η and the velocity vector υ of the AUV; the neural network approaches the compound uncertainty caused by the dynamic uncertainty and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More