

Software-defined drone cluster network controller design method
A cluster network and software-defined technology, applied in the field of UAV network, can solve problems such as complex network management and control, low utilization rate of network resources, and difficulty in cooperative communication of UAVs, and achieve the effect of optimizing cluster network resources and reducing complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
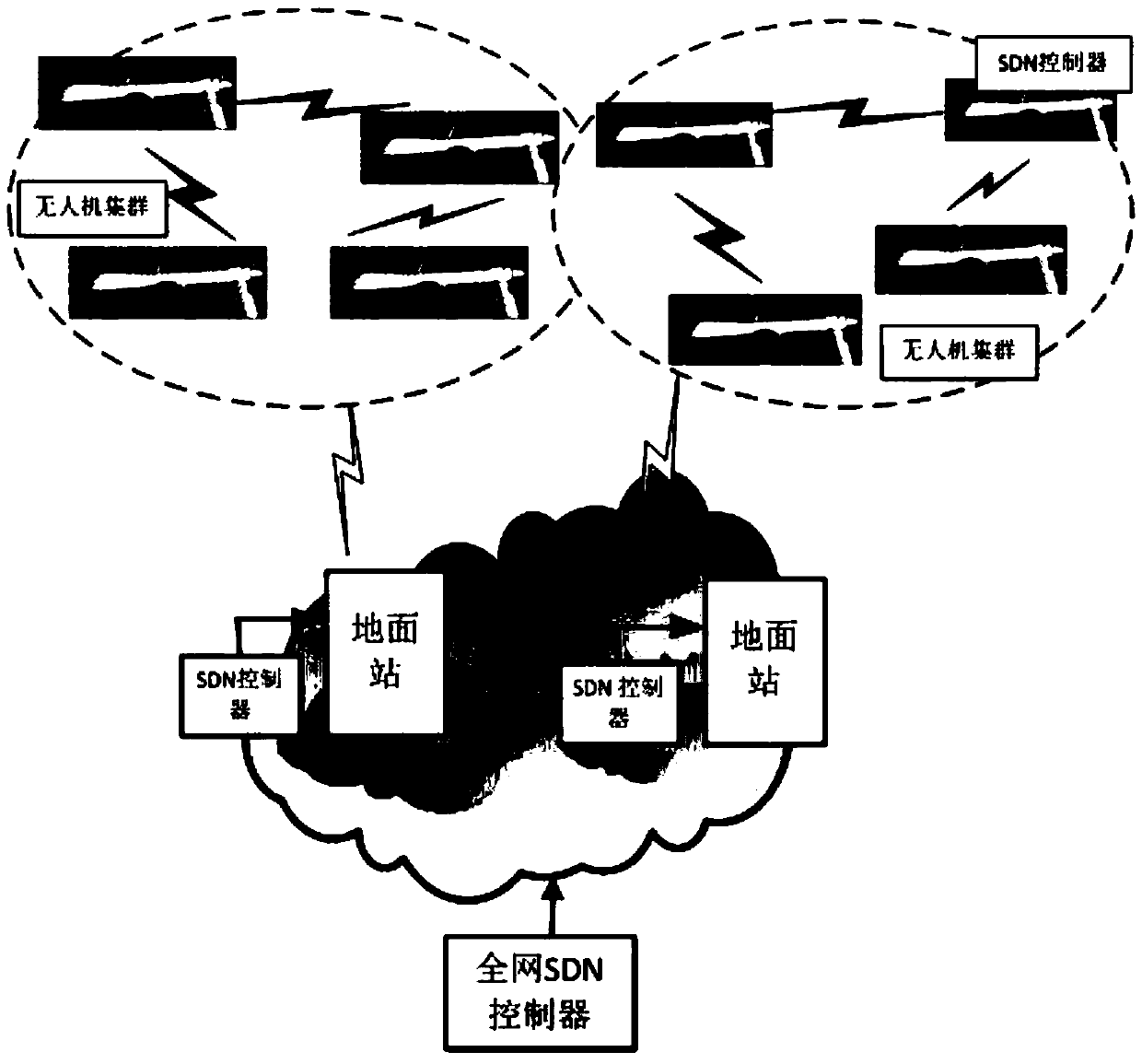
[0032] consider as figure 2 The software-defined UAV swarm network architecture shown consists of an air transmission network and a ground transmission network.
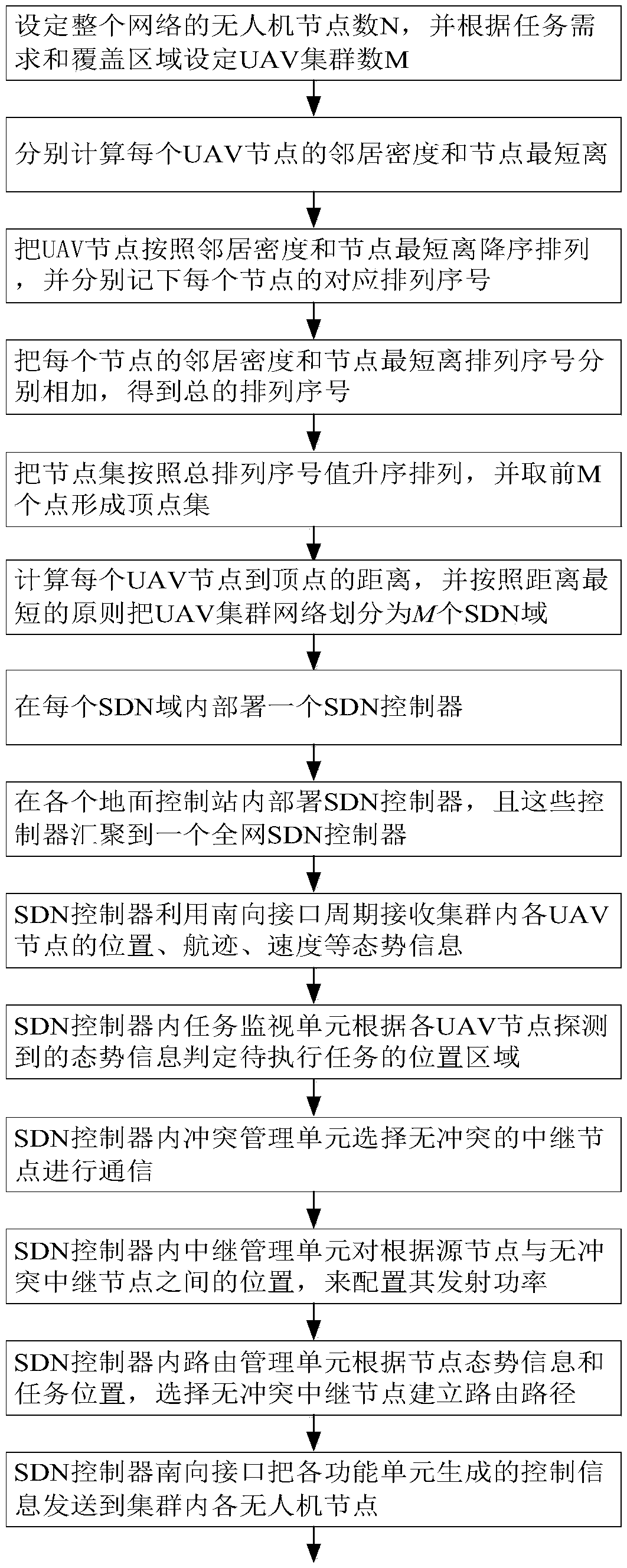
[0033] Step (1): Initialize, set the total number of UAV nodes in the UAV cluster network N=100, each node index is i∈[1,...,100], and set the UAV according to the executed tasks and regions The number of clusters M=10.
[0034] Step (2): Calculate the neighbor density and the shortest distance of each UAV node respectively.
[0035] For example, the neighbor density ρ of node i=1 1 =∑ j d 1j =1000km,d 1j is the actual distance between node 1 and node j in the network; the shortest distance of a node is defined as the shortest distance between node 1 and node j whose neighbor density is higher than 1, that is
[0036] Step (3): Arrange the distribution of UAV node set V in descending order according to ρ value and δ value to obtain set V 1 =[1500,1200,…,500] and V 2 =[100,85,…,10], and write down the corre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More