

A robot with switchable navigation mode, navigation mode switching method and medium
A navigation mode and robot technology, applied in the field of logistics, can solve the problems of robot scheduling congestion and low utilization rate of robots, and achieve the effects of alleviating scheduling congestion, improving utilization rate, and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
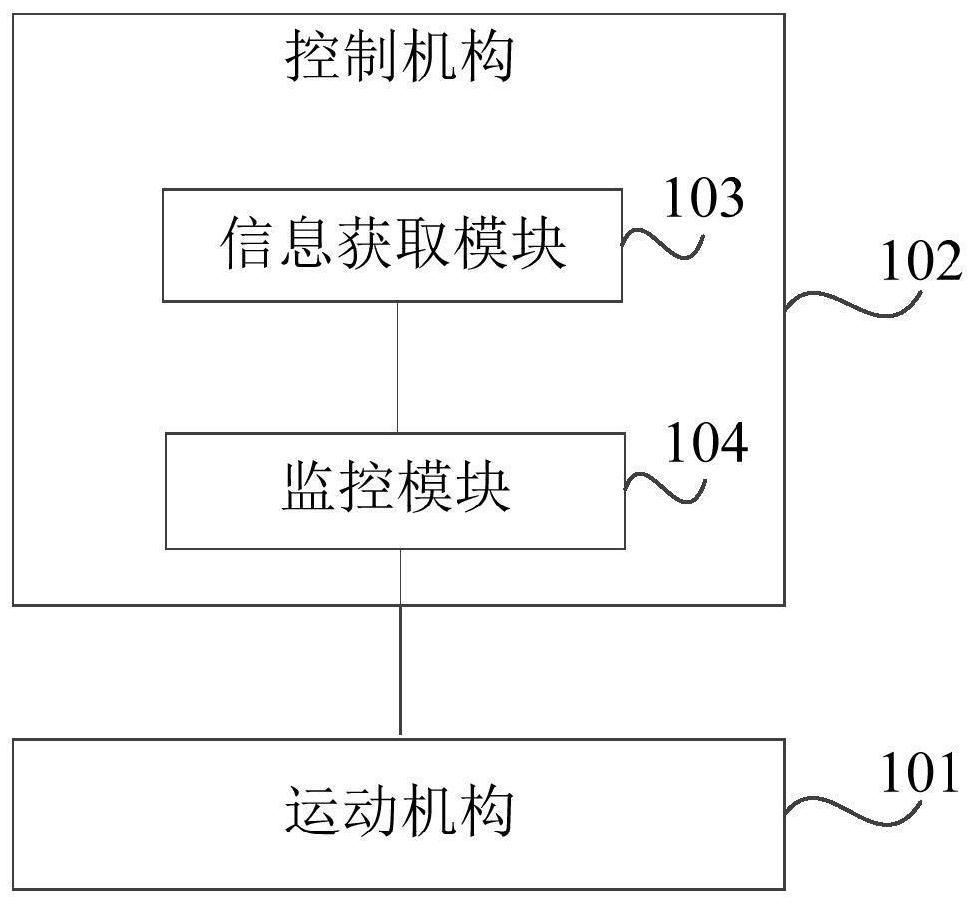
[0078] figure 2 It is a schematic structural diagram of a robot with a switchable navigation mode provided in the first embodiment of the present invention. This embodiment can be applied to the situation where the navigation mode of the robot is switched during the movement of the robot. The robot can be implemented by software and / or hardware. .
[0079] Other components in the robot structure, such as storage devices, sensors, processors, network adapters, and internal connection lines, can be implemented using existing technology, and will not be repeated in this embodiment.
[0080] Such as figure 2 As shown, the robot with switchable navigation mode provided in this embodiment may include a motion mechanism 101 and a control mechanism 102. The control mechanism 102 includes an information acquisition module 103 and a monitoring module 104, wherein:
[0081] The information acquisition module 103 is used to acquire status information of the robot, and determine the current nav...
Embodiment 2
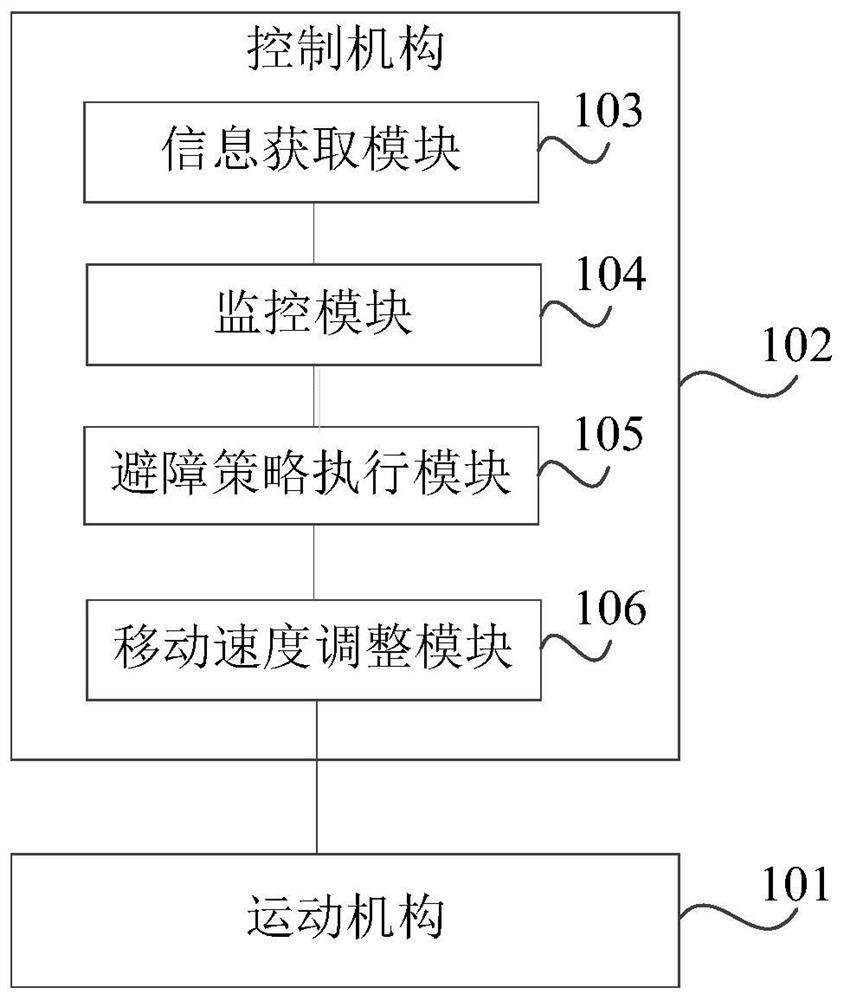
[0102] image 3 It is a schematic structural diagram of a robot with a switchable navigation mode provided in the second embodiment of the present invention. This embodiment is further optimized on the basis of the foregoing embodiment.
[0103] Such as image 3 As shown, the robot with switchable navigation mode provided in this embodiment may include a motion mechanism 101 and a control mechanism 102. The control mechanism 102 includes an information acquisition module 103 and a monitoring module 104, wherein:
[0104] The information acquisition module 103 is used to acquire status information of the robot, and determine the current navigation mode of the robot according to the status information;
[0105] The monitoring module 104 is used to monitor the status information of the robot. If the status information of the robot is monitored during a certain period of time, the robot is controlled to switch the navigation mode, so that the switched navigation mode is adapted to the cha...
Embodiment 3
[0128] Figure 4 It is a flowchart of the robot navigation mode switching method provided in the third embodiment of the present invention. This embodiment can be applied to the situation that the robot navigation mode is switched during the movement of the robot. The method can be executed by the robot navigation mode switching device. The device can be implemented in software and / or hardware, and can be integrated on a robot that can switch navigation modes.
[0129] The technical solution of this embodiment and the execution principle of the robot in the foregoing embodiment belong to an inventive concept, and the content not described in detail in this embodiment can be explained with reference to the content in the foregoing embodiment of the robot.
[0130] Such as Figure 4 As shown, the robot navigation mode switching method provided in this embodiment may include:
[0131] S310. Obtain status information of the robot, and determine the current navigation mode of the robot ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More