

Route planning method for autonomous vehicle based on vector map and grid map
A grid map and vector map technology, applied in vehicle position/route/altitude control, motor vehicles, transportation and packaging, etc., can solve the problems of large computational load, poor path planning accuracy, and high requirements for on-board sensors, to meet real-time requirements. performance and accuracy, the effect of reduced occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
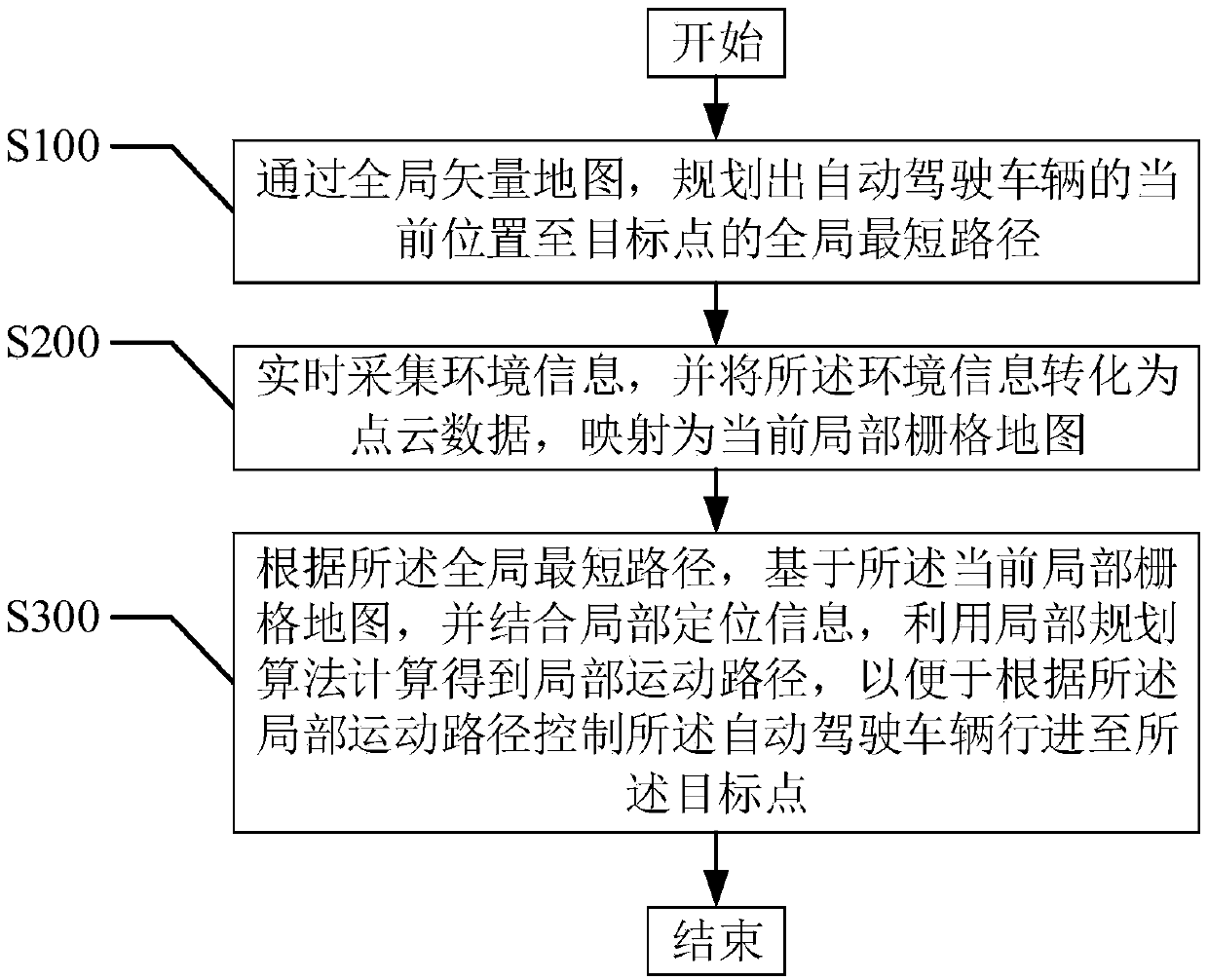
[0063] refer to figure 2 , the first embodiment of the present invention provides a path planning method for an autonomous vehicle based on a vector map and a grid map, including:
[0064] Step S100, planning out the global shortest path from the current position of the autonomous vehicle to the target point through the global vector map;
[0065] An autonomous vehicle, also known as a driverless car, a computer-driven car, or a wheeled mobile robot, is a kind of intelligent car that realizes unmanned driving through a computer system. In the 20th century, it has a history of several decades, and the beginning of the 21st century shows a trend of close to practical use.
[0066] The global vector map is a vector map within a certain range, for example, a vector map in a city area, or a vector map in a parking lot.
[0067] The starting point and focus of path planning are between the current position of the autonomous vehicle and the target point. The global shortest path ...
Embodiment 2
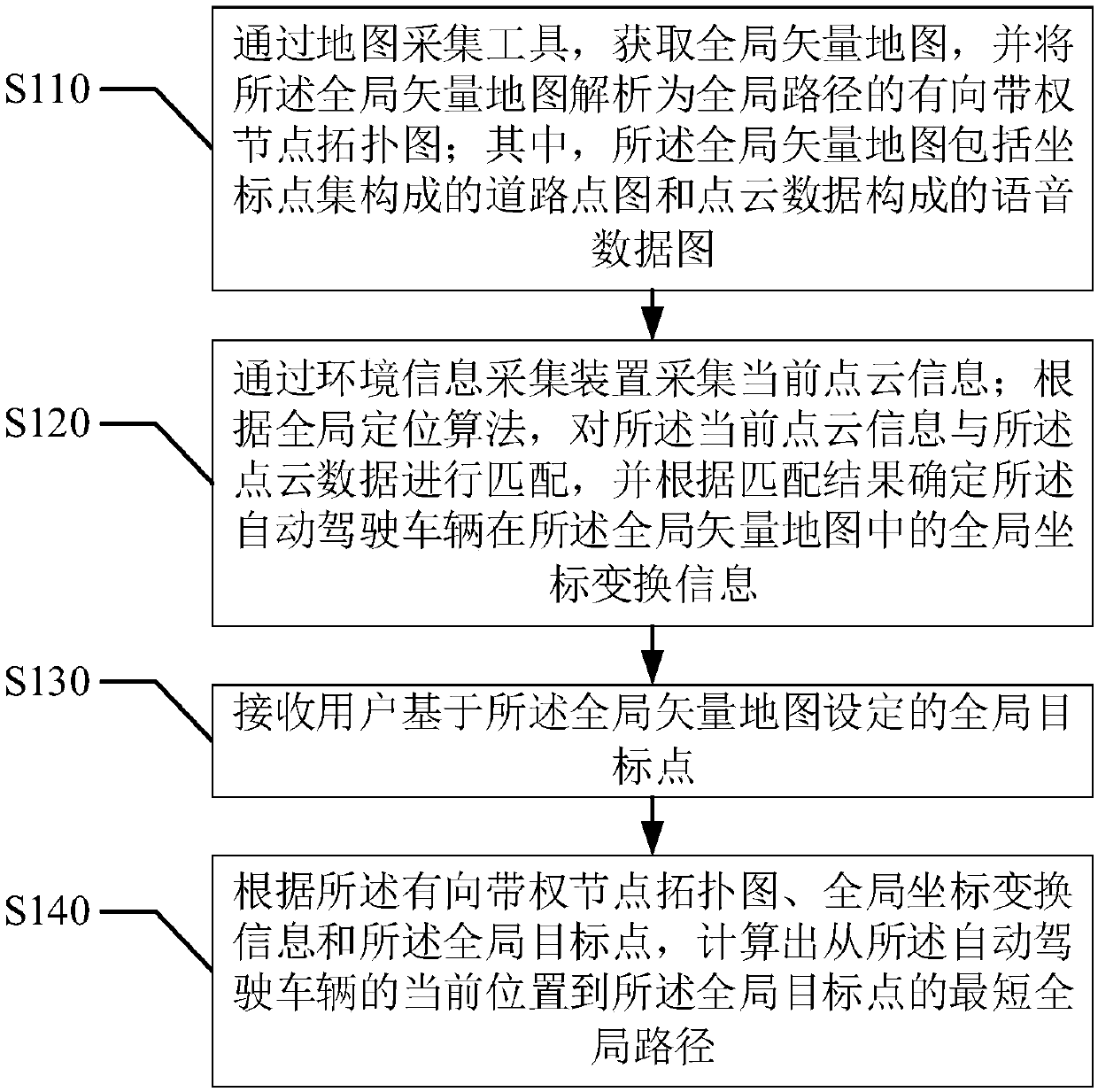
[0079] refer to Figure 3-4 , the second embodiment of the present invention provides a path planning method for an autonomous vehicle based on a vector map and a grid map, based on the above figure 2 In the illustrated first embodiment, the step S100, "planning the global shortest path from the current position of the autonomous vehicle to the target point through the global vector map" includes:
[0080] Step S110, obtain a global vector map through a map collection tool, and parse the global vector map into a directional weighted node topology map of a global path; wherein, the global vector map includes a road point map composed of a coordinate point set and a Voice data map composed of point cloud data;
[0081] Further, the step S110, "obtaining a global vector map, and parsing the global vector map into a directional weighted node topology map" includes:
[0082] Step S111, collecting and obtaining the global vector map;
[0083] Step S112, run the global map parser...
Embodiment 3
[0092] refer to Figure 5-8 , the third embodiment of the present invention provides a path planning method for an autonomous driving vehicle based on a vector map and a grid map, based on the above figure 2 In the first embodiment shown, the step S200, "collecting environmental information in real time, converting the environmental information into point cloud data, and mapping it to the current local grid map" includes:
[0093] Step S210, segment and fuse the current point cloud information collected by the environmental information collection device, and map the segmented and fused current point cloud information to a two-dimensional grid map to obtain a preliminary grid map ;
[0094] Step S220, based on the current point cloud information, obtain the current local grid map according to the preliminary grid map.
[0095] Further, the step S220, "acquiring the current local grid map according to the preliminary grid map based on the current point cloud information" incl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More