

Variable stiffness dielectric elastomer actuator based on magnetorheological elastomer
A magnetorheological elastomer and dielectric elastomer technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in bearing large loads, limiting driver application, slow response speed, etc., to improve load capacity, Responsive and easy-to-create effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several changes and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
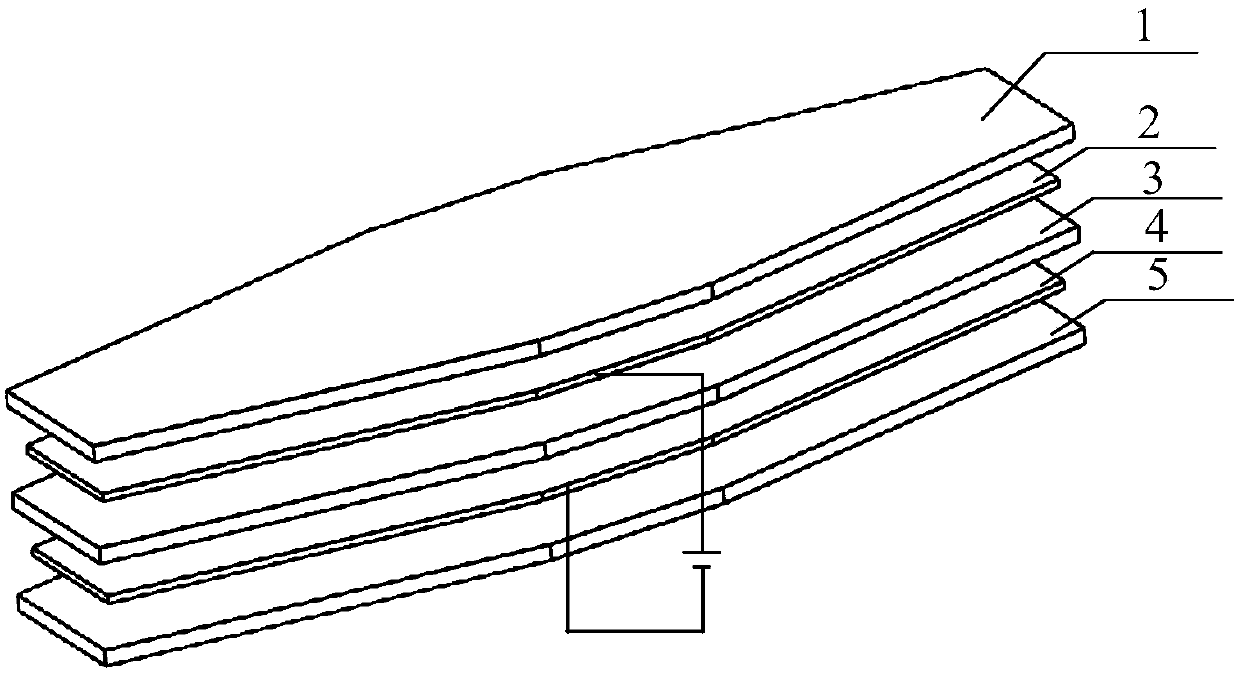
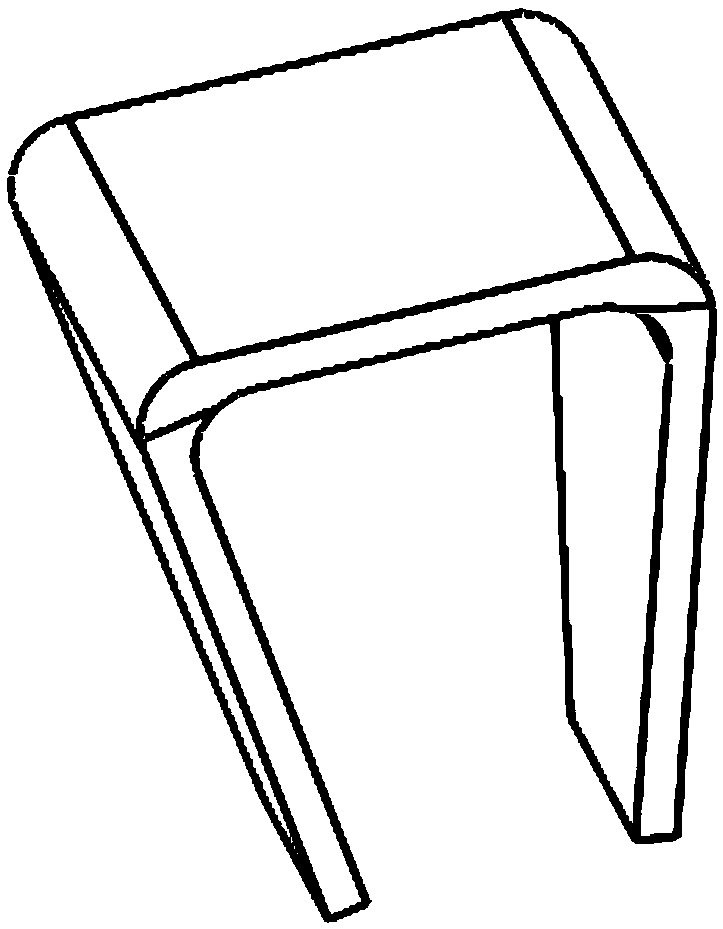
[0030] The variable stiffness dielectric elastomer driver based on the magnetorheological elastomer provided by the present invention is mainly composed of a dielectric elastomer driver structure including a minimum energy structure, and the main component to realize the variable stiffness is a magnetorheological elastomer based Variable stiffness film. Magnetorheological elastomer is a kind of magnetorheological material prepared by dispersing magnetic particles in a solid or gel-like matrix and curing...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Bending angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More