

Robot hand-eye calibration method
A calibration method and robot hand technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of parameter errors and low precision of industrial robots, and achieve the effect of avoiding parameter errors, high measurement accuracy, and accurate and reliable calibration results.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific embodiment of the present invention will be described in further detail by describing the embodiments below with reference to the accompanying drawings, the purpose is to help those skilled in the art to have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and contribute to its implementation.
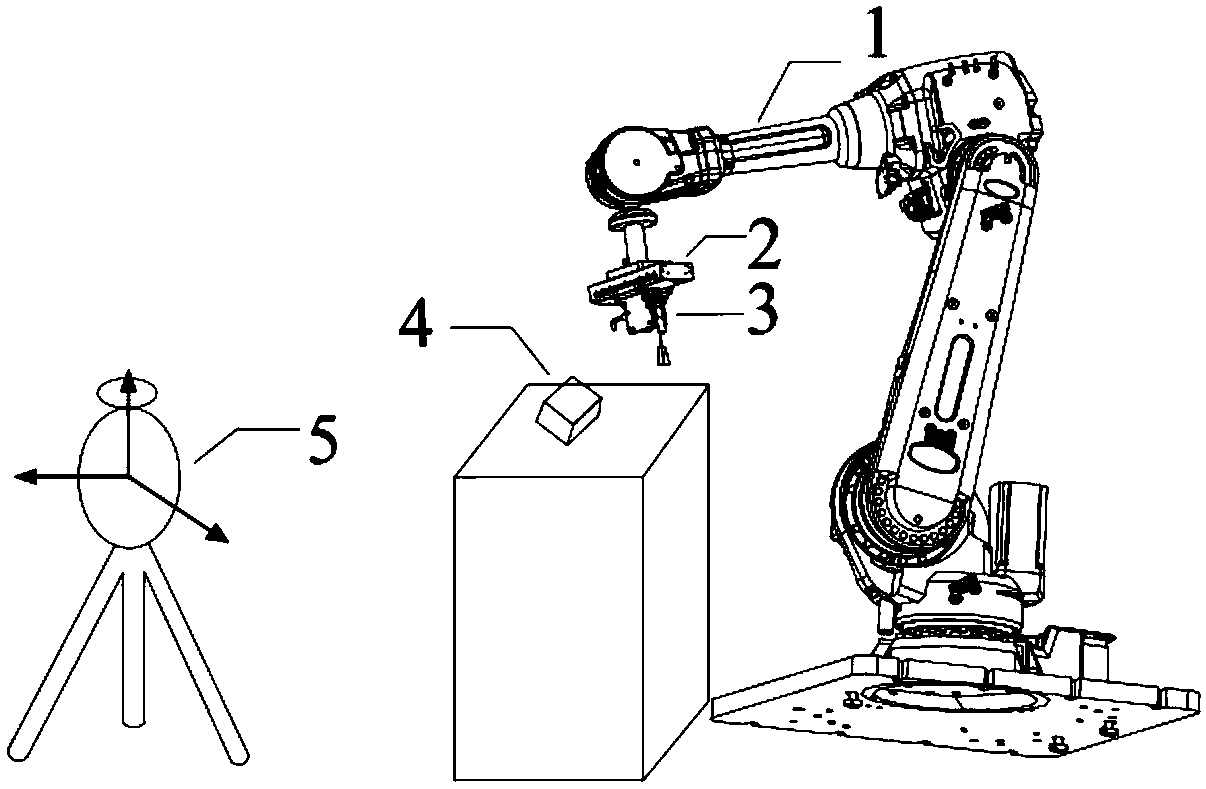
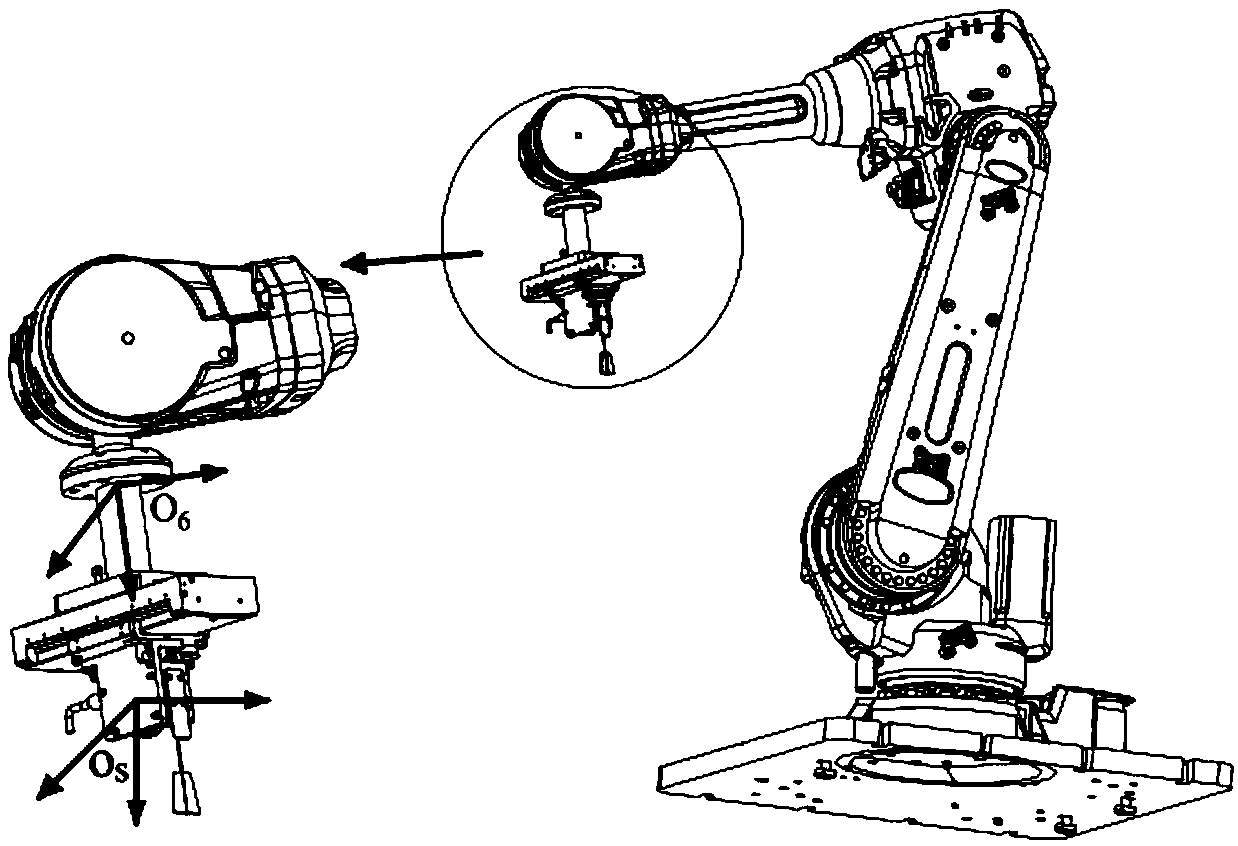
[0031] Such as figure 1 and figure 2 Shown, the present invention provides a kind of robot hand-eye calibration method, comprises steps:
[0032] S1. Set the laser tracker and the tetrahedron, and set the laser scanner for measuring the tetrahedron on the industrial robot;
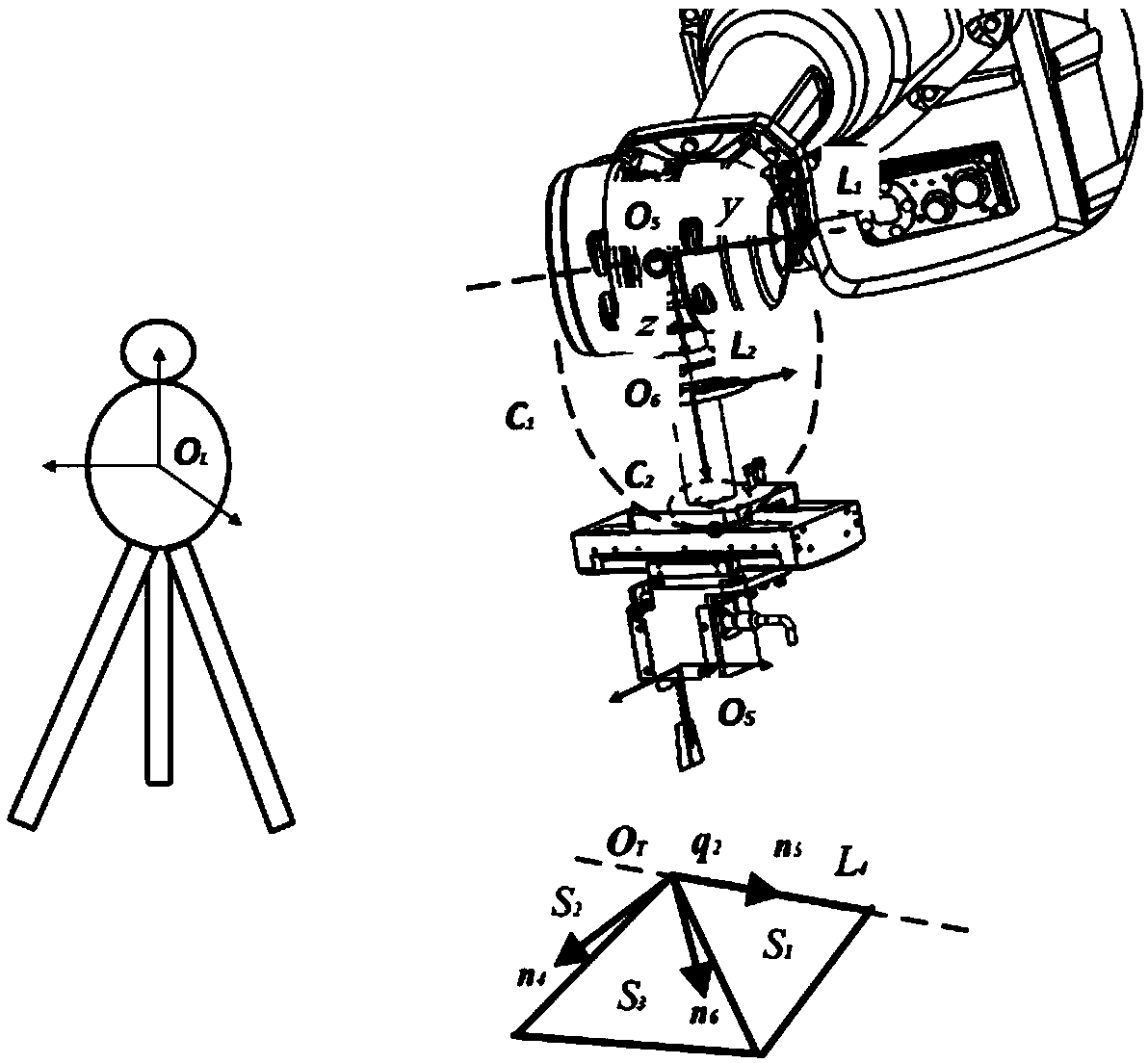
[0033] S2. Calculate the conversion matrix
[0034] S3, calculate the conversion matrix
[0035] S4. Calculate the conversion matrix
[0036] Specifically, as figure 1 and figure 2 As shown, the industrial robot is a six-degree-of-freedom robot, and the end effector is used as the sixth joint axis of the industr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More