

GNSS (Global Navigation Satellite System) receiver-based time service method and GNSS (Global Navigation Satellite System) receiver
A receiver and time technology, applied in the field of satellite timing, can solve the problem that the output accuracy of PPS does not meet the requirements, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Embodiments of the present application will be described in detail below in conjunction with the accompanying drawings. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined arbitrarily with each other.
[0020] The steps shown in the flowcharts of the figures may be performed in a computer system, such as a set of computer-executable instructions. Also, although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
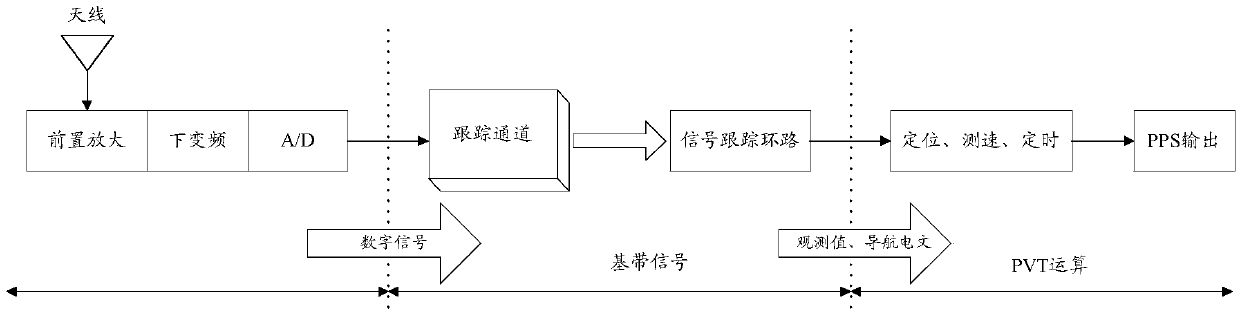
[0021] figure 1 It is a schematic diagram of the principle of the timing GNSS receiver. like figure 1 As shown, after the time service GNSS receiver receives the GNSS satellite signal through the antenna, it can perform pre-amplification, down-conversion and analog-to-digital (A / D) conversion processing on the received satellite signal, so as to convert ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More