On-demand configurable program control flow graph accessibility indexing method
A program control flow graph and accessibility technology, applied in program code conversion, software engineering design, error detection/correction, etc., can solve the problems of large space-time overhead, reduce space-time overhead, improve accessibility information index and The effect of query efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0019] Specific implementation mode 1: The on-demand reducible program control flow graph graph reachability indexing method provided in this implementation mode specifically includes the following steps:
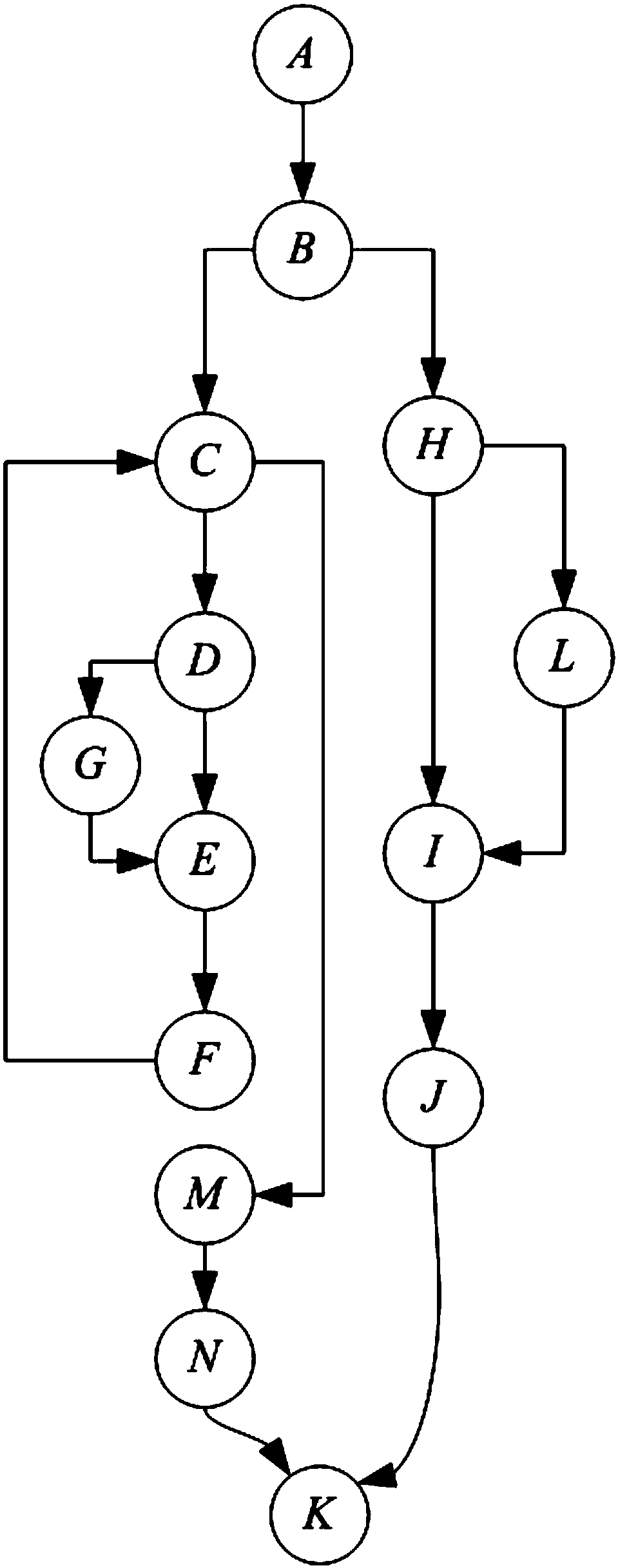
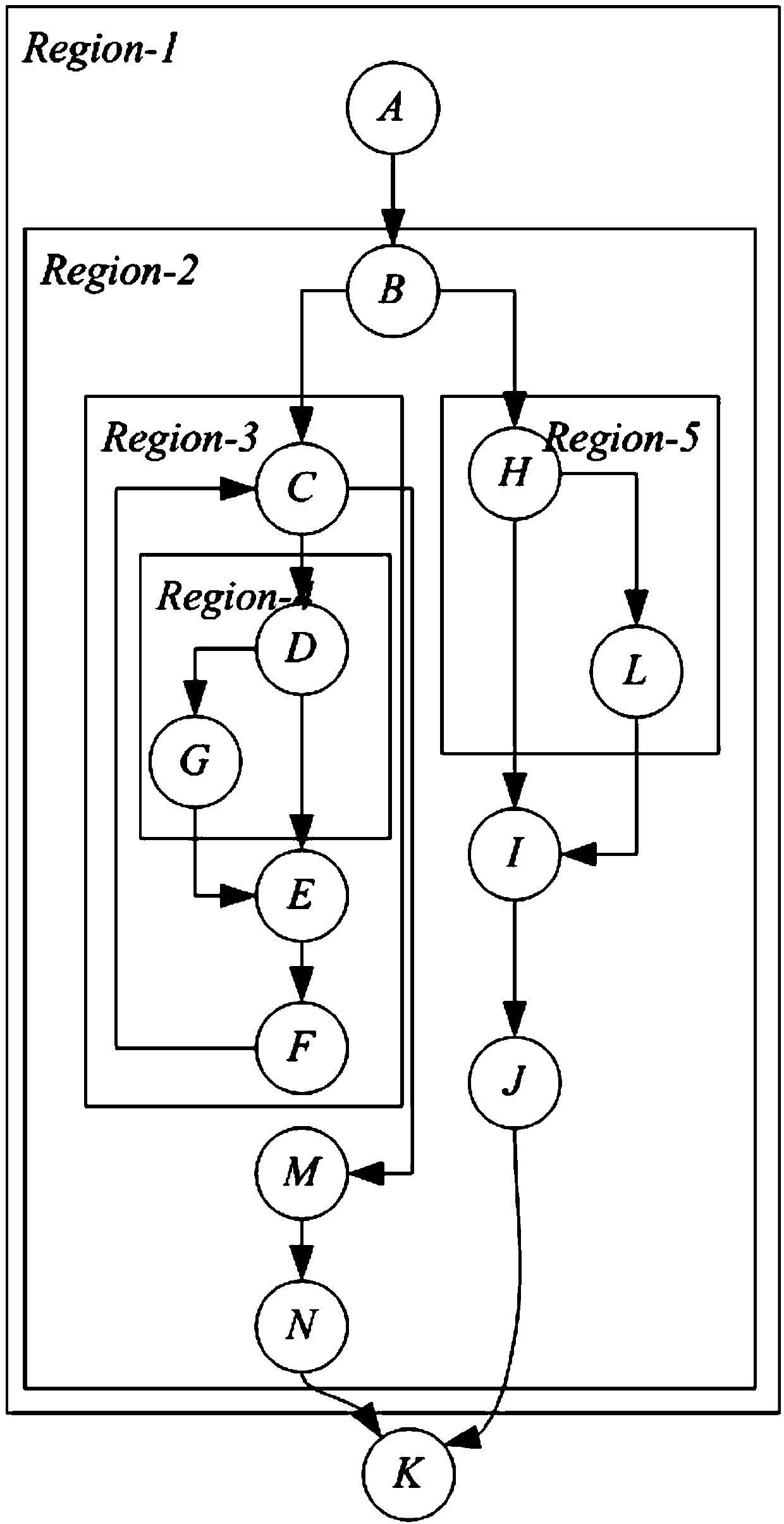
[0020] Use the depth-first strategy to traverse all the nodes in the program control flow graph; use the depth of the regional hierarchy as the measurement weight, and store the nodes to be encoded through the weighted work list (Worklist); the weighted work list is realized by the heap data structure, and the nodes inserted into the list are based on the region Hierarchical depth sorting (such as line ② and line 2 of the hierarchical linearization coding algorithm code below Line, No. line), to ensure that the top node has the deepest level, and the nodes in the pop-up list are nodes sorted according to the depth-first strategy of the area level (such as line ④); specifically:
[0021] Step 1. Initialize the work list, such as lines ①~②;
[0022] Step 2, then sort acco...
specific Embodiment approach 2
[0030] Embodiment 2: The difference between this embodiment and Embodiment 1 is that the hierarchical linearization encoding domain corresponding to the encoding process is specifically:
[0031] HLCDomain={G,DT,RT,ST,HLC,≤R}
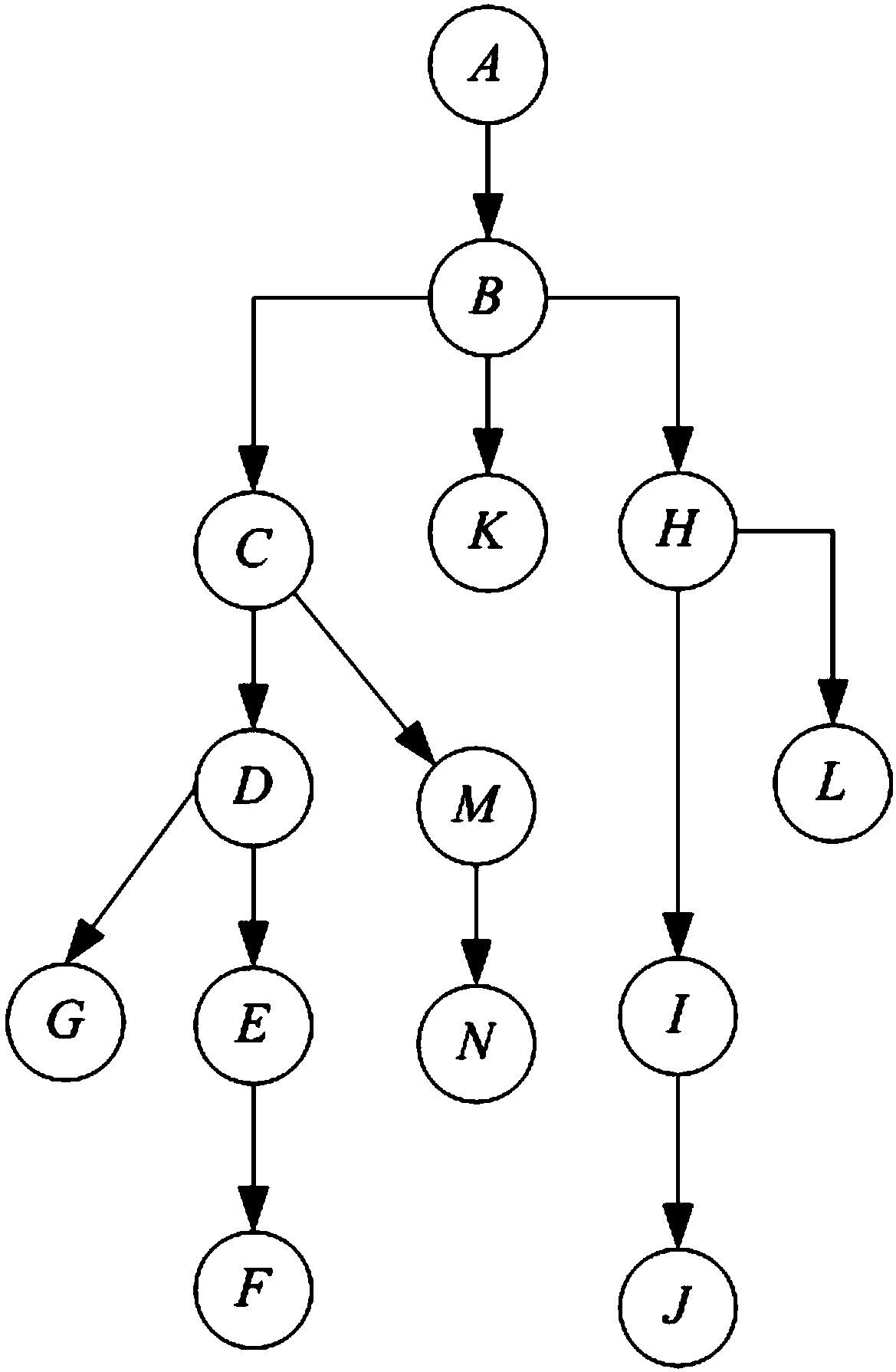
[0032] The field is a six-tuple. Among them, HLCDomain represents the hierarchical linearization coding domain, which includes the hierarchical linearization coding structure, its affiliation and the information on which the structure depends; G is a program control flow graph, which is a directed graph, G=(V,E ); |V|=n, n is a node; |E|=m, m represents the level depth (the number of edges) of the region where the node is located; DT is the dominator tree corresponding to the program control flow graph; RT is the corresponding program control flow graph The region structure tree of , ST=(V,E ST ) is the spanning tree generated by the depth-first traversal of the region hierarchy G, and the corresponding non-tree edge E NST =E-E ST ; HLC is the node ...
specific Embodiment approach 3
[0035] Specific implementation mode 3: The difference between this implementation mode and specific implementation mode 2 is that the hierarchical linearization coding structure is specifically:
[0036] HLC M =(HLC parent ,LC M )=(LC 0 M ,LC 1 M ,…,LC m-1 M ,LC M )=(LC (0,m-1) M ,LC M )=LC (0,m) M
[0037] Among them, HLC M is the hierarchical linearization code of node M; m represents the hierarchical depth of the area where node M is located; LC 0 M ,LC 1 M ,…,LC i M HLC M Intra-layer sequence encoding of the region head node experienced from the root node of the directed flow graph to the current node, i∈[0,m]; LC M =LC m M is the sequence code in the lowest layer area where node M is located; HLC parent Encodes the hierarchical linearization of the parent node.
[0038] Other steps and parameters are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More