Learning type robot action data collection method
A motion data, robot technology, applied in the direction of electrical digital data processing, special data processing applications, digital data information retrieval, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Step S1: Through design, it is determined that the main learning robot is a natural human appearance, which is highly dependent on its functional nature and scope.
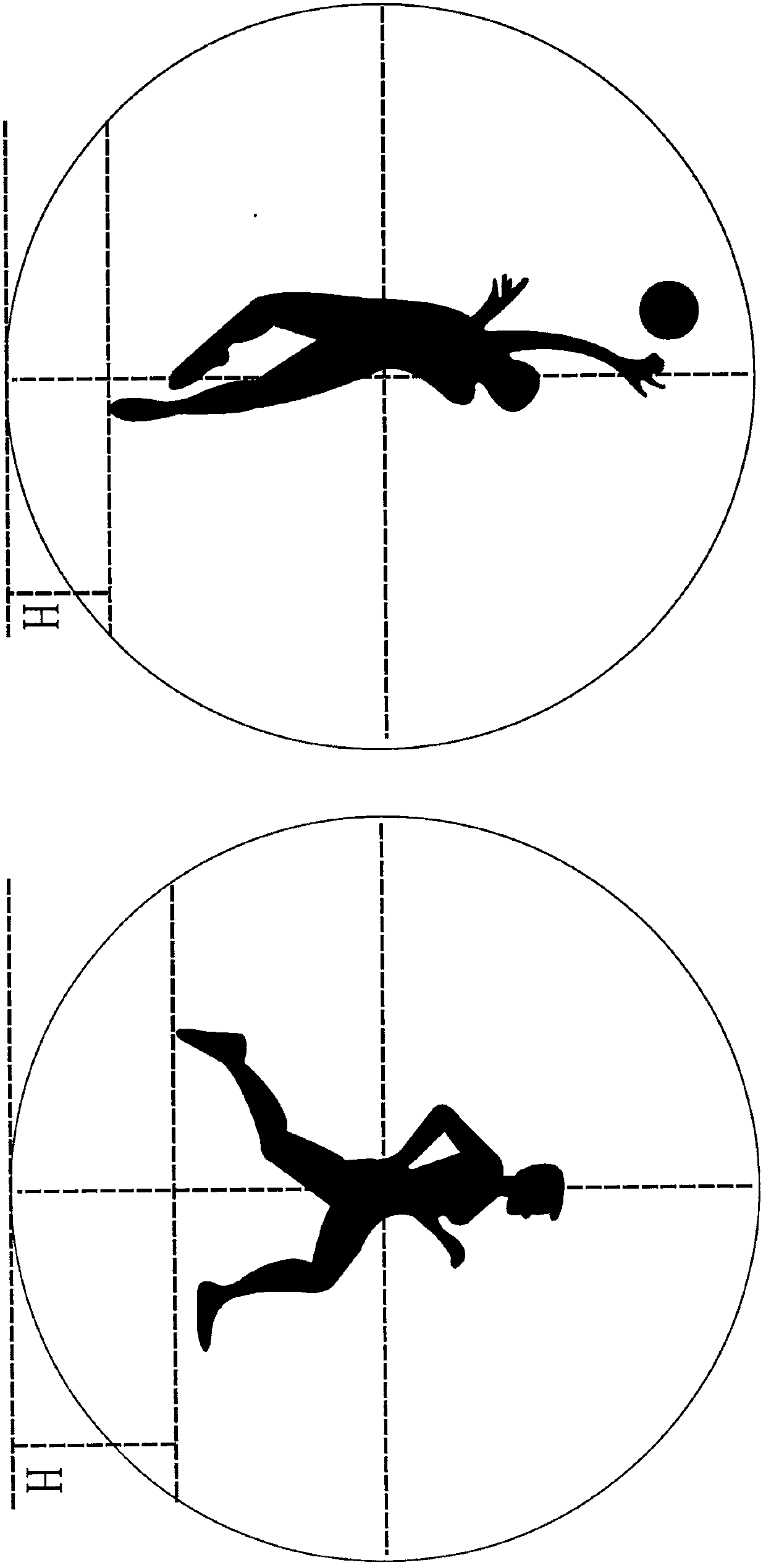
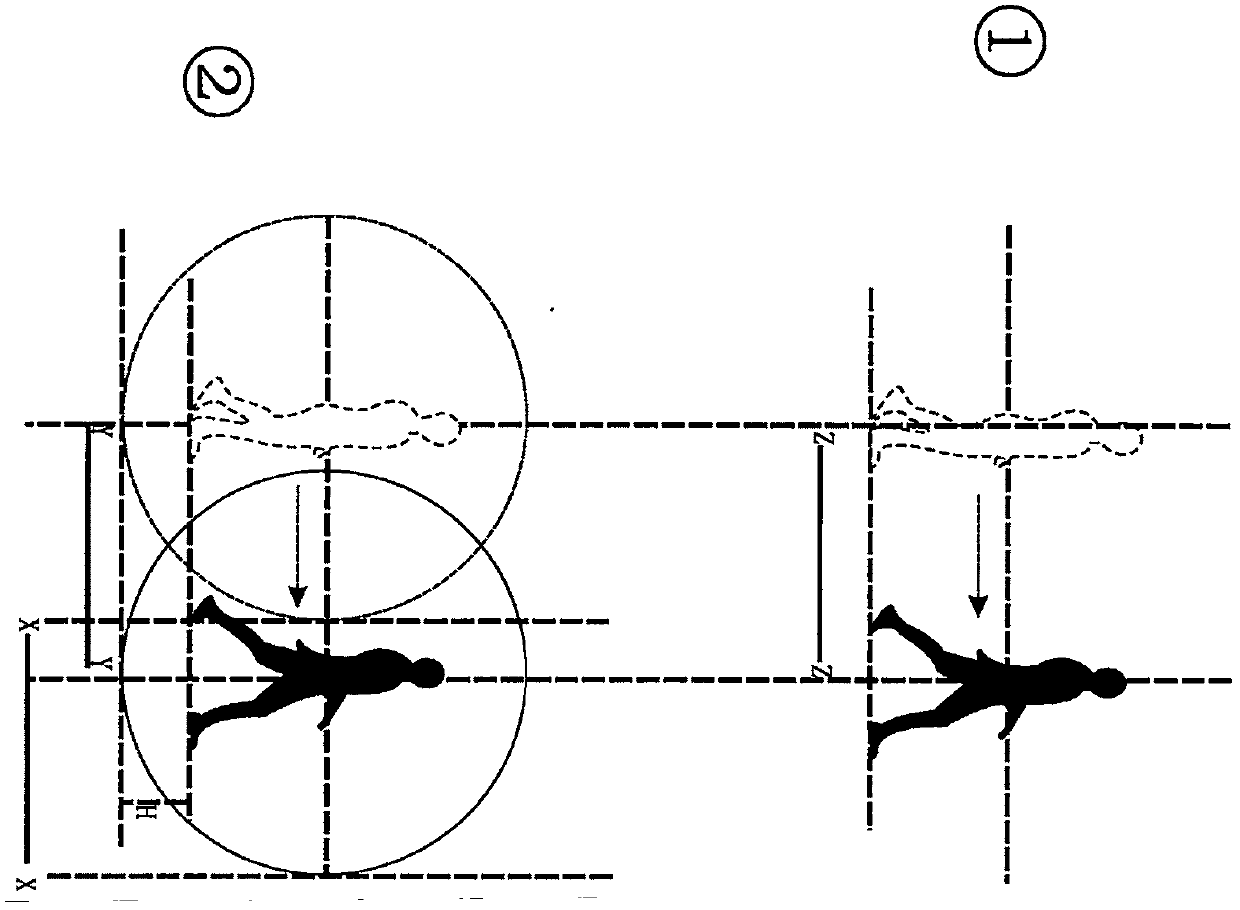
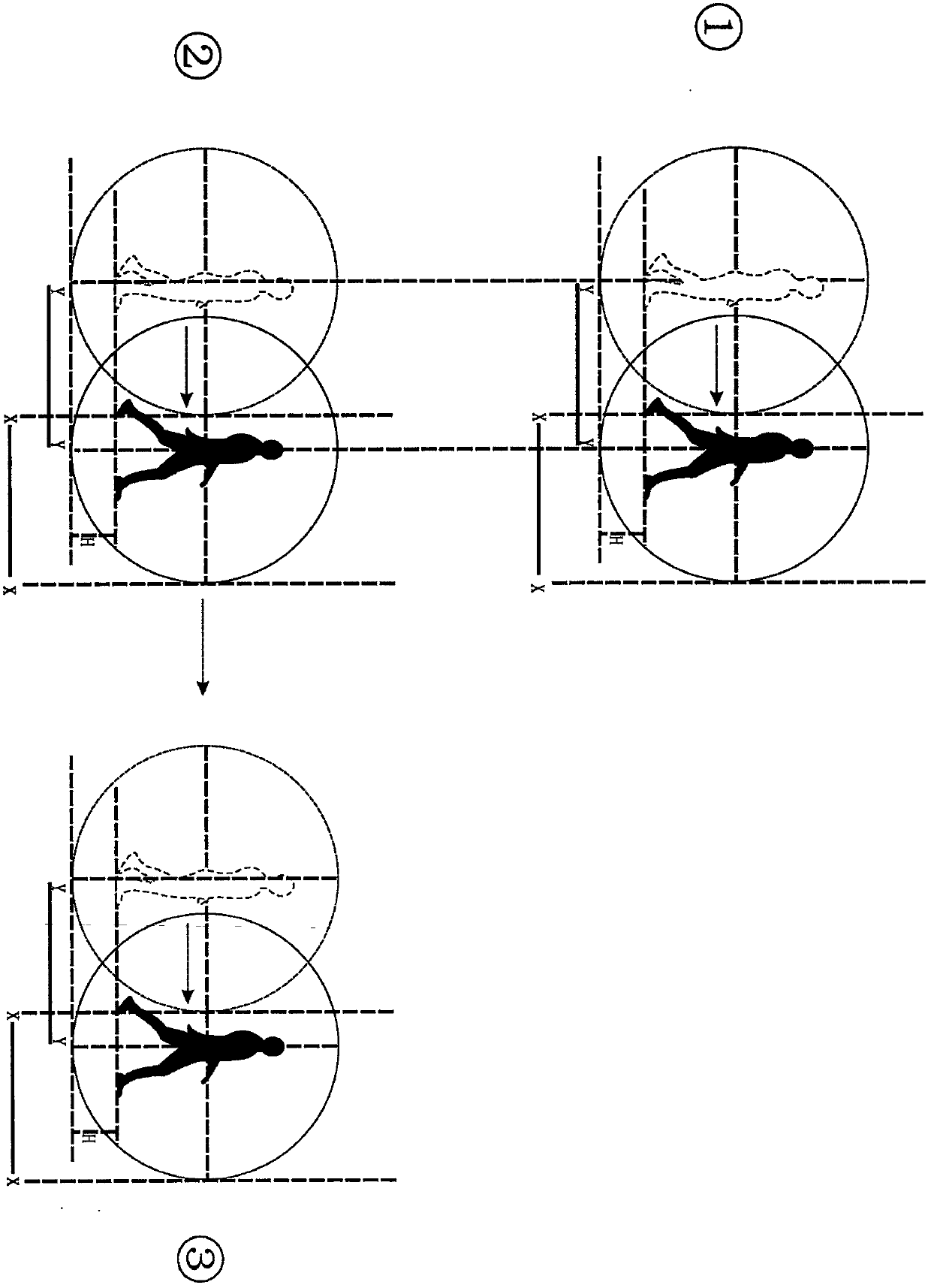
[0030] Step S2: Set the sphere person
[0031] All actions of a natural person must be within a sphere whose diameter is the height of the natural person's standing posture and whose radius is greater than the maximum range and distance of all actions of the natural person. Based on this, the natural person in the sphere is designed as a sphere person. It is suggested that the appearance characteristics of the first type of spherical person be the same as that of the main robot, and the other types of spherical persons are determined according to the appearance characteristics of various natural persons in society. Therefore, when designing the appearance characteristics of a spherical person, the appearance characteristics of all natural persons must be designed.
[0032] Step S3: Set the sphere data of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com