

Carrying robot
A technology for handling robots and bases, applied in the field of robots, can solve problems such as high flatness requirements, overhead driving wheels, affecting walking accuracy, etc., and achieve the effect of strong ground adaptability, ensuring walking accuracy, and ensuring running stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
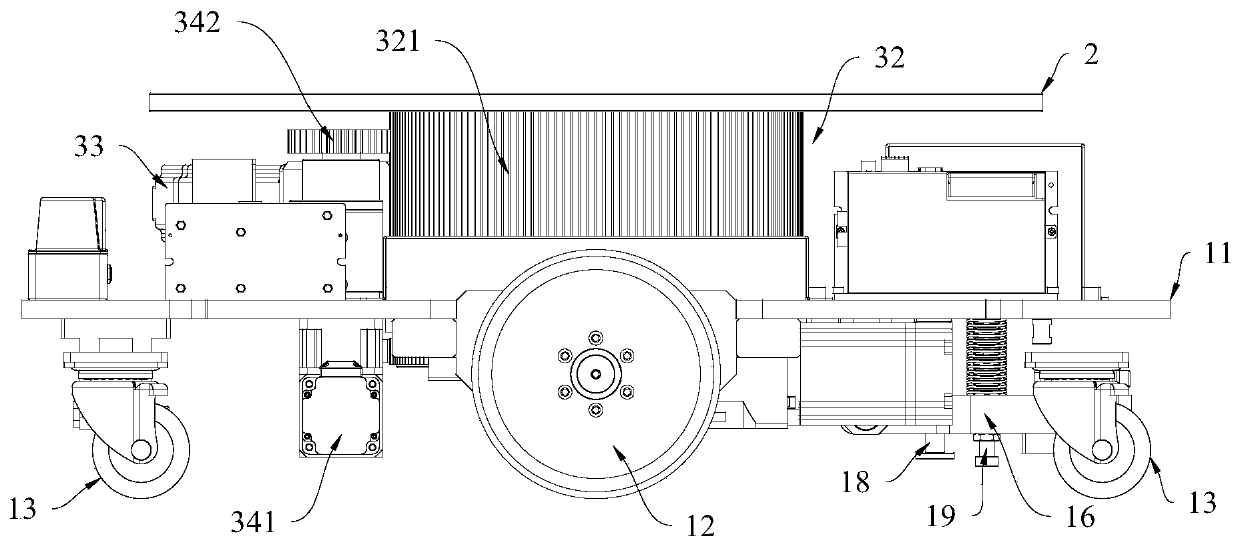
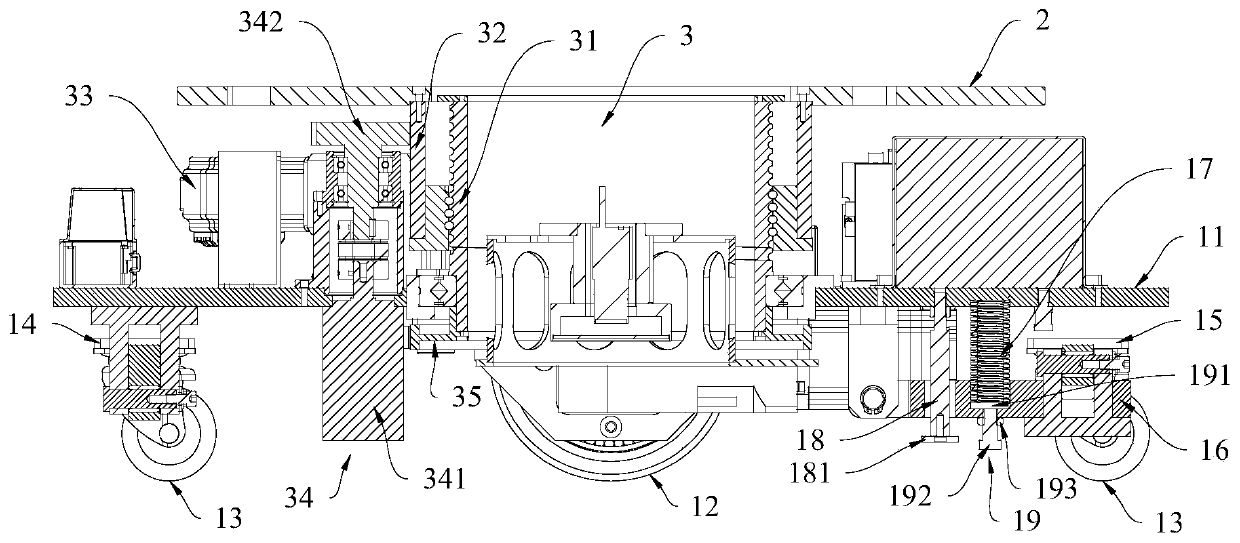
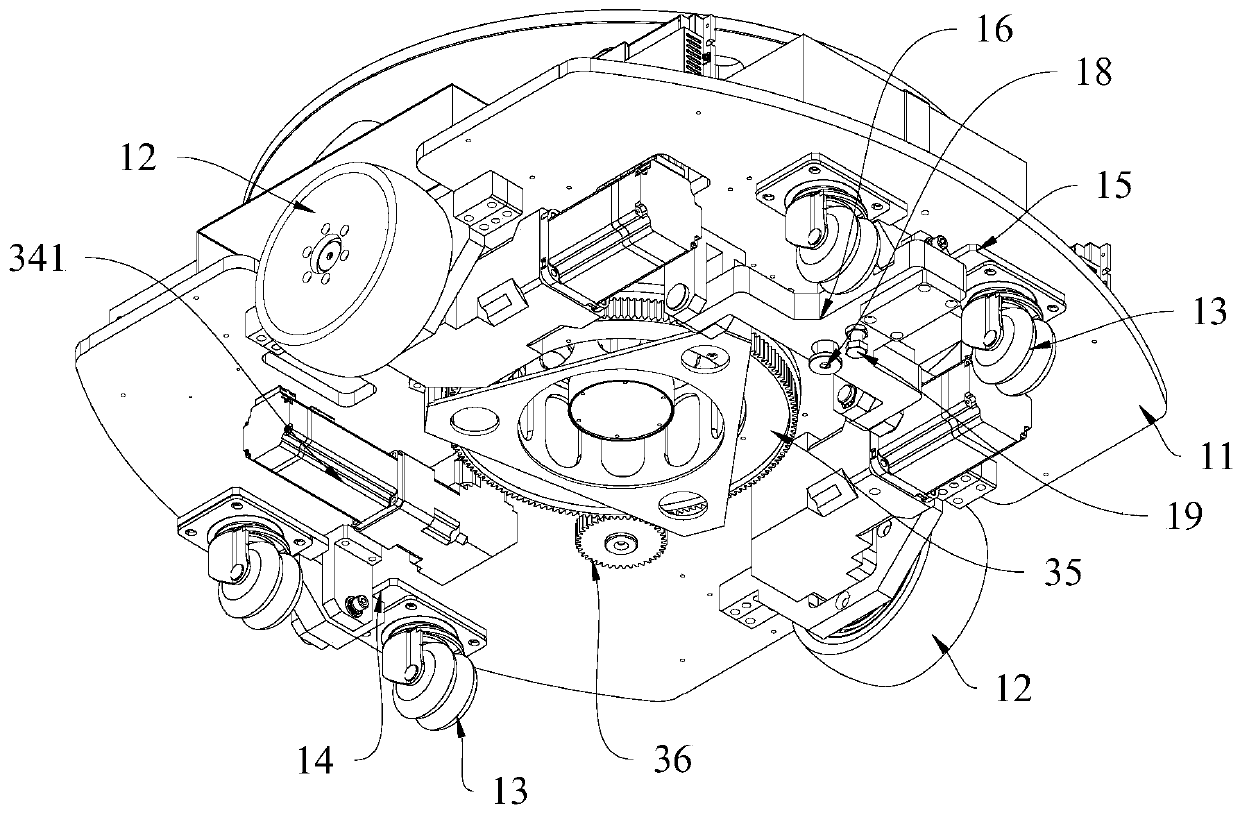
[0043] as attached figure 1 - attached image 3 The conveying robot shown includes a chassis 1 , a pallet 2 and a jacking and rotating unit 3 . Each component is described in detail below.
[0044] Chassis 1 comprises a base 11, two driving wheel assemblies 12 and several driven wheels 13; wherein, two groups of said driving wheel assemblies 12 are symmetrically installed on the left and right sides of the middle part of said base 11, and the front and rear of said base 11 At least one driven wheel 13 is provided on each side, and the driven wheel 13 is floatingly connected to the base body 11 . The layout of the above-mentioned driving wheel assembly 12 and driven wheel 13 can make the transfer robot turn around its center in situ, and the turning radius is the smallest, so that the transfer robot can work in a small space, and this driving wheel assembly 12 and driven wheel The layout of 13 makes the support of the entire chassis 1 stable, and the floating connection of t...
no. 2 example
[0053] In this embodiment, the transport robot includes a chassis 1 , a pallet 2 and a jacking and rotating unit 3 . The functions and structures of the chassis 1 and the jacking and rotating unit 3 are completely consistent with those of the first embodiment, and will not be repeated here.
[0054] On the basis of the first embodiment, since in the first embodiment, the tray 2 is an integrally formed disc, the bearing area of its upper end surface is relatively small. There will be situations where the load is unstable. When the robot stops suddenly due to an unexpected situation, the goods are easy to shake, move in translation relative to the pallet 2 or even fall over. Therefore, the structure of the pallet 2 is improved in this embodiment.
[0055] Specifically, as attached Figure 4 with attached Figure 5 As shown, the structure of the tray 2 includes a tray body 21 , several brackets 22 and a bracket driving unit 23 . Wherein, the tray body 21 is circular, and it ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More