Indoor targeting robot
A robot and industrial computer technology, applied in the direction of target, armor, offensive equipment, etc., can solve the problems of inability to realize intelligent operation and intelligent charging, insufficient stability and controllability, and low level of robot intelligence, so as to improve controllability and operation. Stability, improve indoor shooting training, improve the effect of flexibility and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manners of the present invention will be further described below with reference to the accompanying drawings.
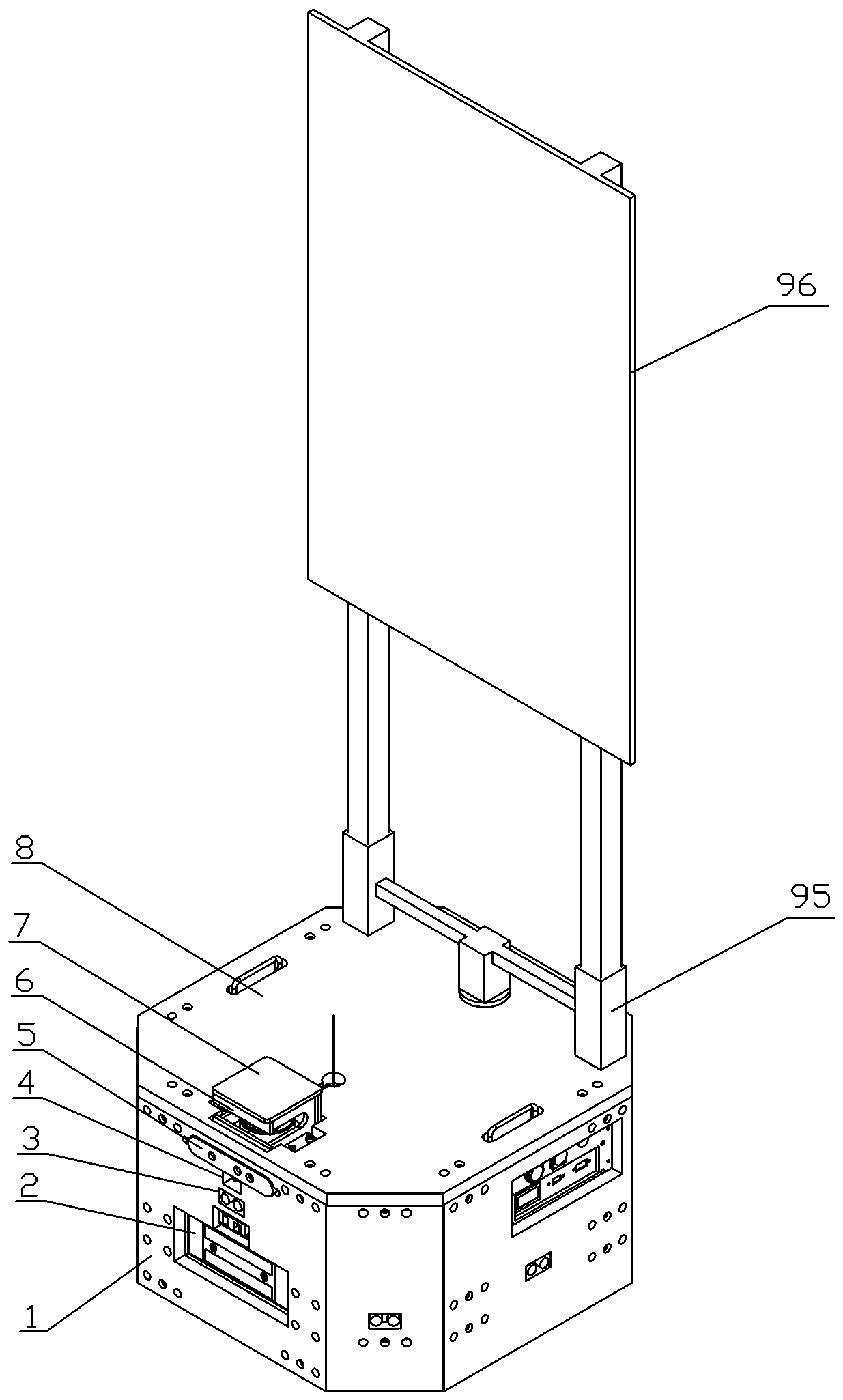
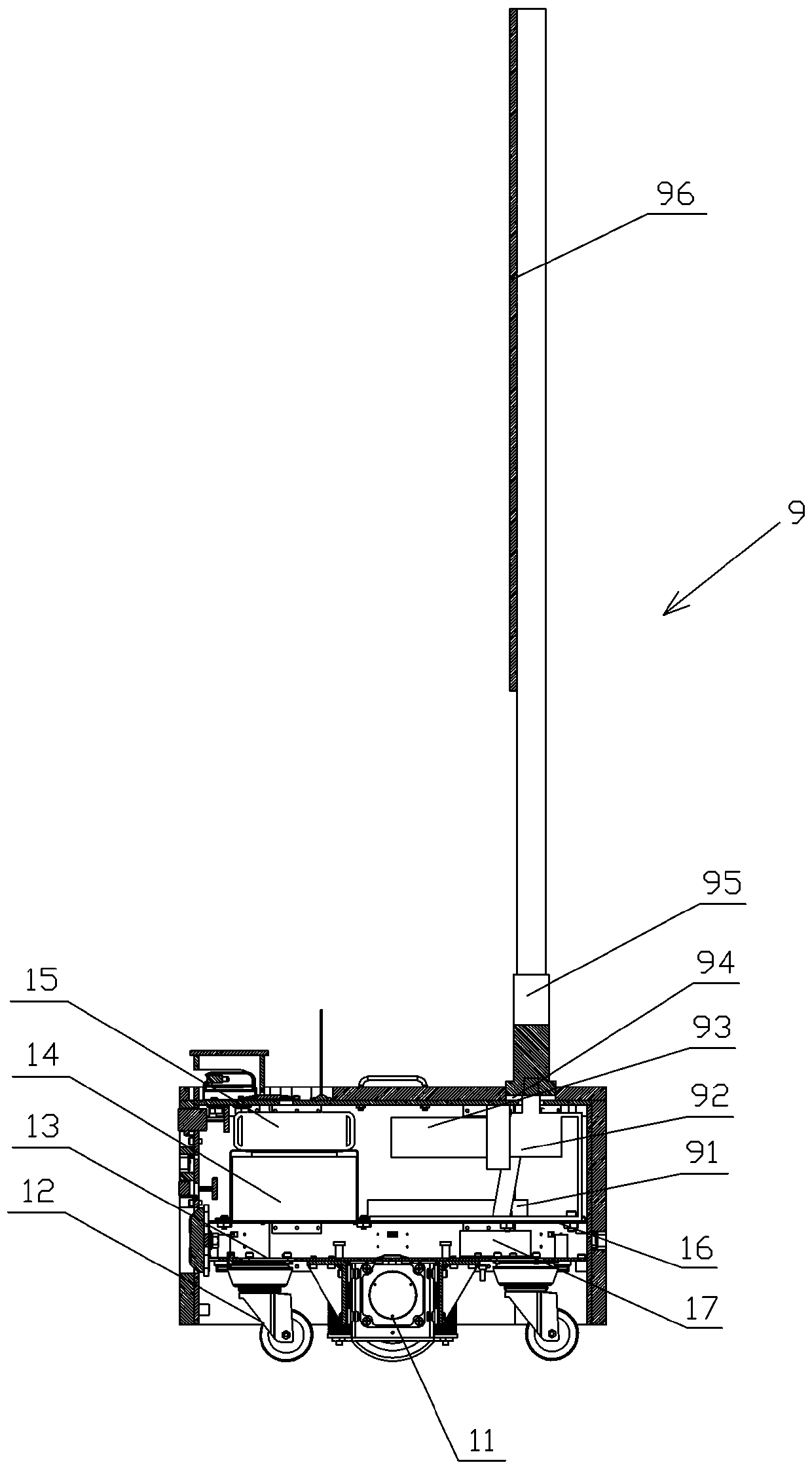
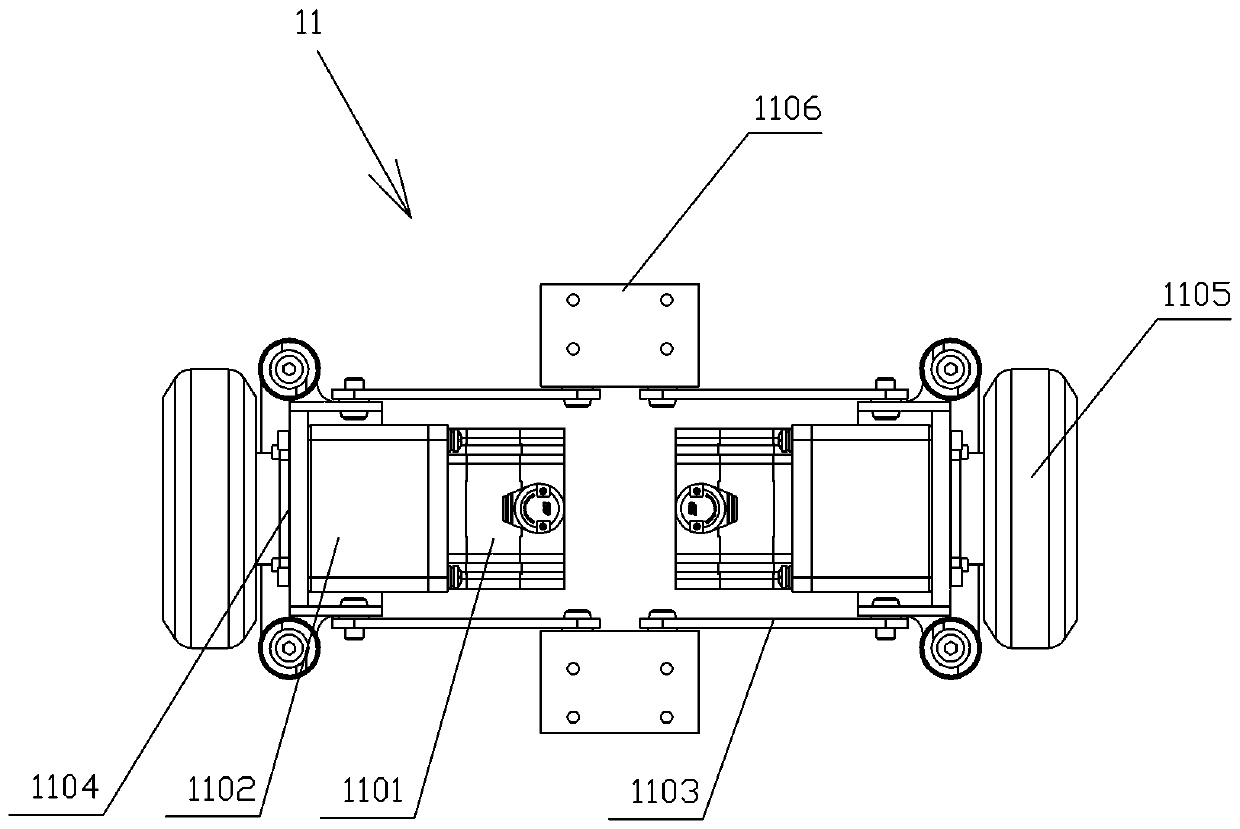
[0035] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Figure 6 and Figure 7 As shown, an indoor target-shooting robot includes a chassis 1, on which a rotatable target body 9 is mounted, and a driving mechanism 11, a driven mechanism 12, a base plate 13, and a first power supply body are installed in the chassis 1. 14. Industrial computer 15, controller mounting plate 16 and second power supply body 17, the drive mechanism 11 is electrically connected to the first power supply body 14, and the industrial computer 15 is fixedly mounted on the controller mounting plate 16 and is electrically connected with the second power supply body 17, the driven mechanism 12 cooperates with the driving mechanism 11 to control movement, and the front side of the chassis 1 is equipped with a charging pole 2, an infrared re...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap