

Flexible arm capable of being driven to extend
A telescopic drive and software technology, applied in the field of bionic robots, can solve problems such as complex control structure and control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
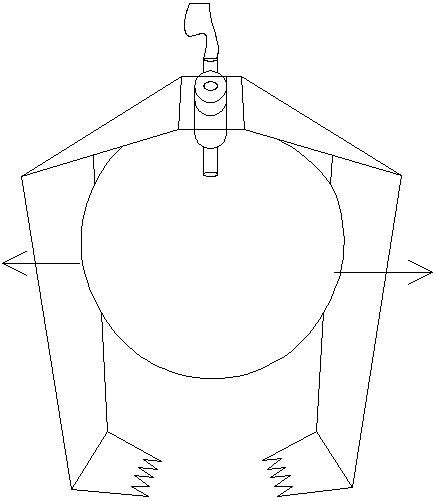
[0063] As shown in the figure, the software arm of this embodiment includes a first fixed plate, a second fixed plate, a first elastic air bag, a second elastic air bag, a first air delivery tube, a second air delivery tube, a connection spring, a clamping hand assembly, and A connecting pipe connected to the first fixing plate. Wherein, the first fixing plate is provided with a first through hole, the connecting pipe is connected with the first fixing plate, and the second fixing plate is provided with a second through hole. In this embodiment, the connecting pipe can be used to fix the first elastic airbag and ensure uniform inflation of the first elastic airbag.
[0064] The two ends of the connecting spring are fixedly connected with the first fixing plate and the second fixing plate respectively, the first fixing plate, the connecting spring, and the second fixing plate are connected in sequence, and the inner side of the connecting spring is formed between the first fixi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More