

Man-machine coupled longitudinal collision avoidance control method
A control method and human-machine technology, applied in the direction of automatic starting devices, etc., can solve the problems of rigid control and narrow application range, so as to improve safety and solve the effect of narrow application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
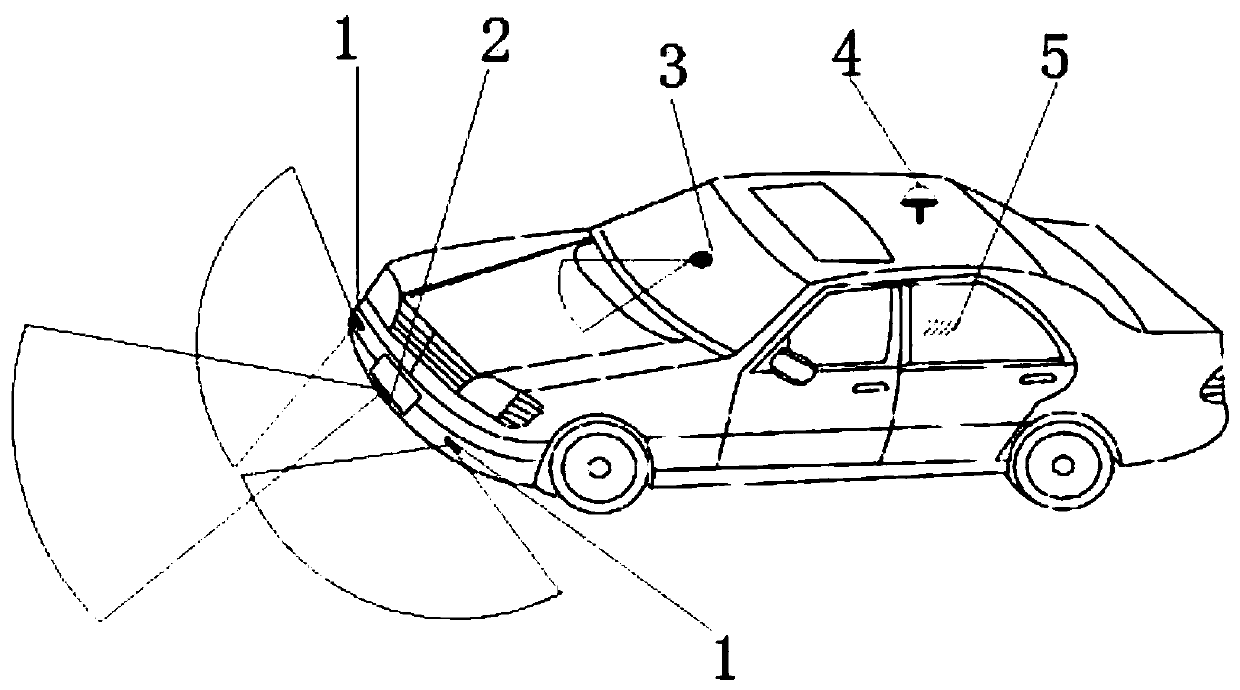
[0033] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
[0034] Such as Figure 1-Figure 3 As shown, the present invention includes the following characteristic components: 1 is a short-range detection radar, 2 is a long-range detection radar, 3 is a camera, 4 is a vehicle speed sensor, and 5 is an acceleration sensor.
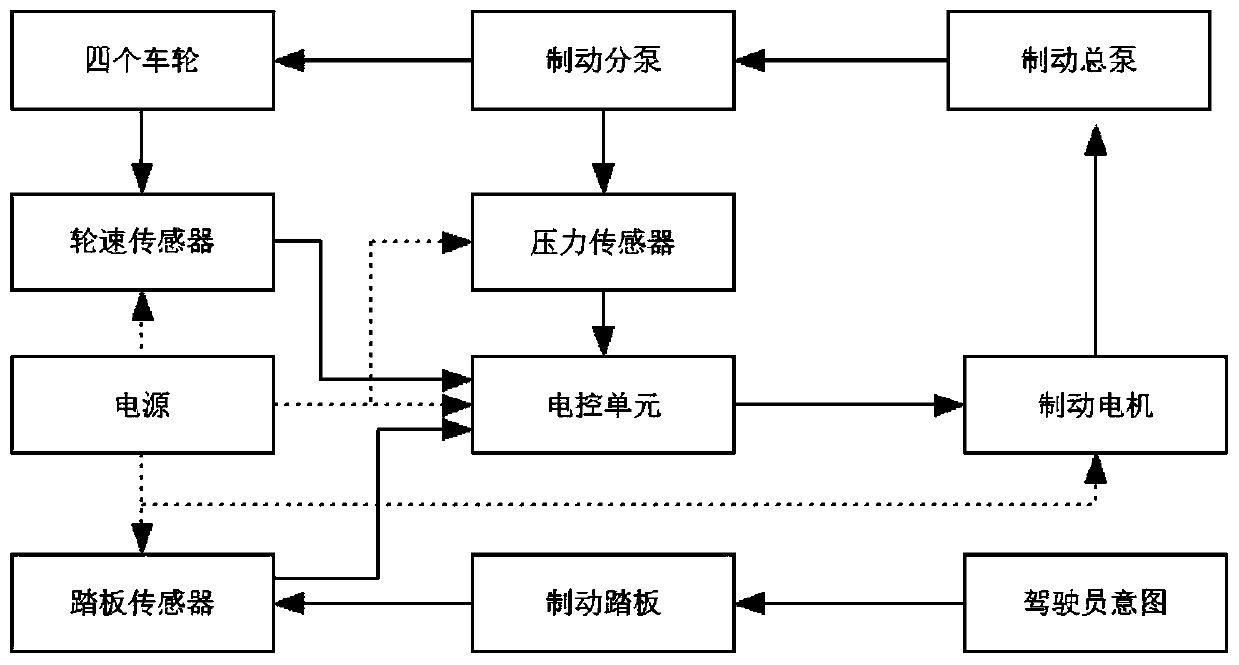
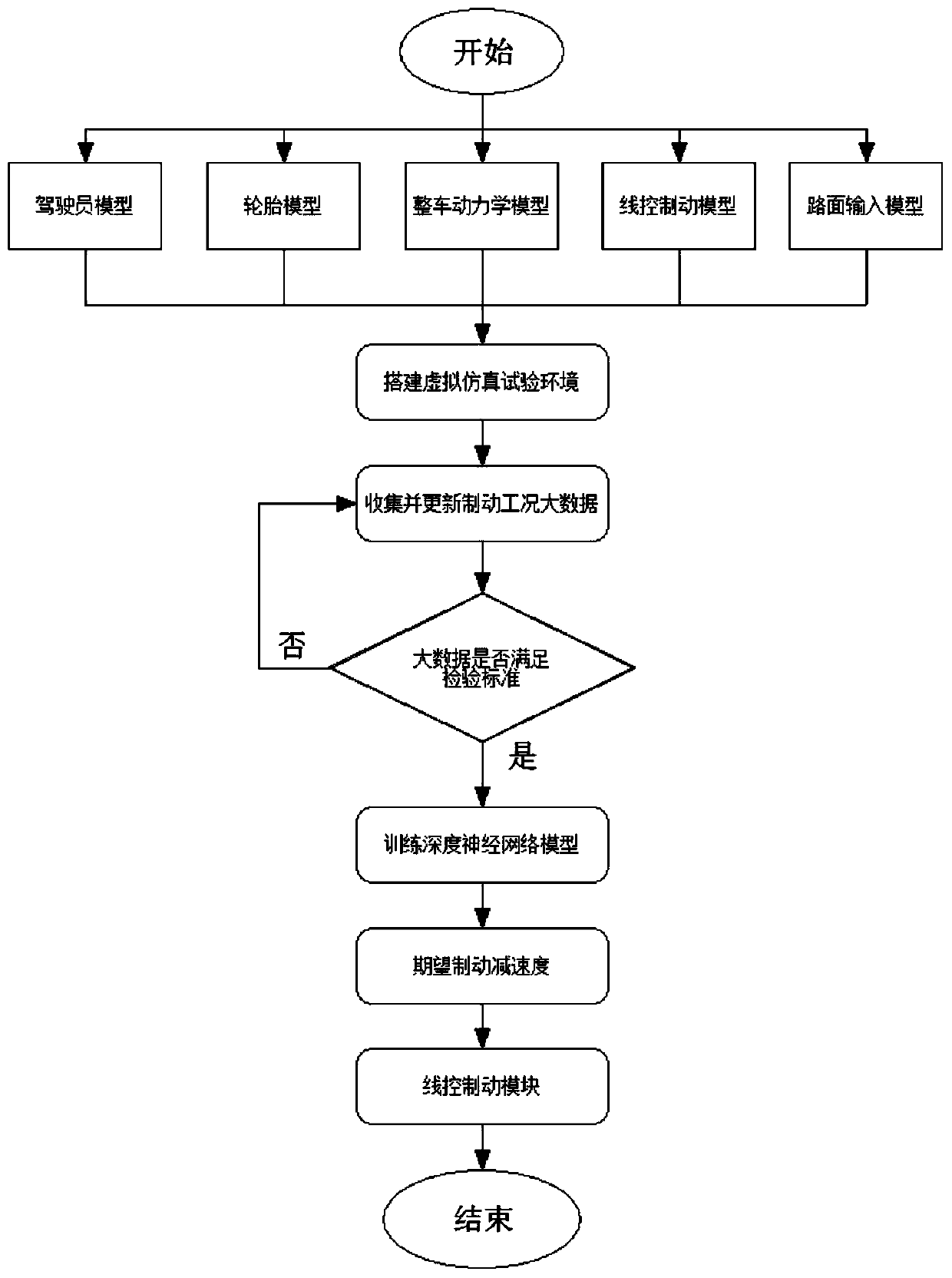
[0035] A human-machine coupled longitudinal collision avoidance control method, including a brake-by-wire module, an active perception module and an anthropomorphic control module, the aforementioned anthropomorphic control module includes a driver model and a deep neural network anthropomorphic decision controller, wherein the active perception module obtains Traffic conditions are input to the dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More