

Multi-rotor unmanned aerial vehicle control system
A multi-rotor drone and control system technology, applied in the field of drone control, can solve the problems of increasing power consumption and reducing the endurance of drones, and achieve the goals of reducing energy consumption, improving endurance, and increasing endurance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
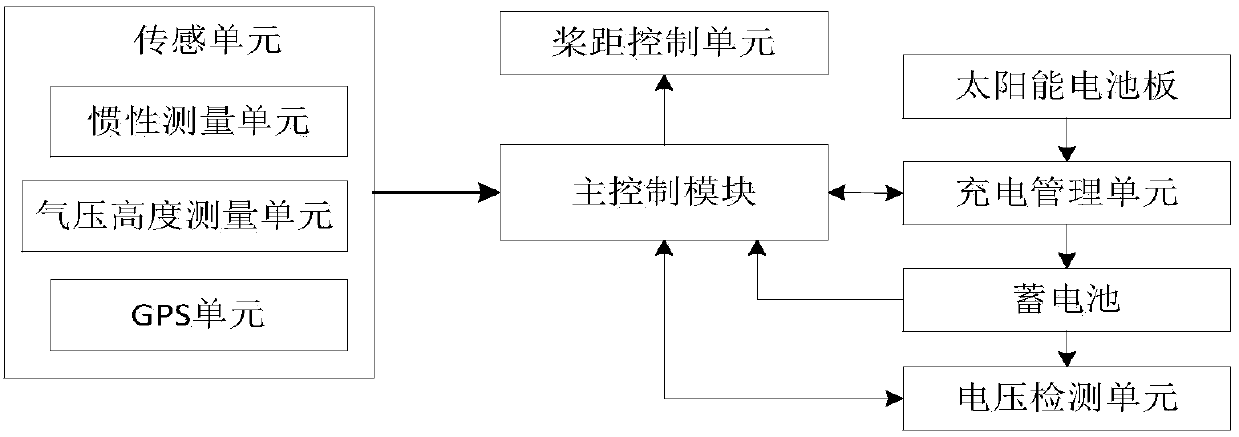
[0009] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
[0010] Such as figure 1 As shown, the multi-rotor UAV control system in this embodiment includes a main control module, a sensing module, an execution unit and a power supply module, the sensing module includes an inertial measurement unit, a barometric altitude measurement unit and a GPS unit, and the execution unit includes Motor and multiple pitch control units, the motor is used to simultaneously drive multiple rotors to rotate, each pitch control unit is used to control the pitch of each rotor, and the pitch control unit changes the angle of the rotor through the steering gear; the sensor module and the execution The units are respectively connected to the main control module.
[0011] In this embodiment, the main control module adopts STM32F427 microprocessor. The main control module is the core of the whole system, responsible for the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More