

Method for improving reliability of monocular vision localization through environmental model integrity assessment
An environment model and monocular vision technology, applied in navigation computing tools and other directions, can solve the problem that the correct matching of feature points is difficult to achieve, and achieve the effect of improving reliability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described below in conjunction with specific embodiment:
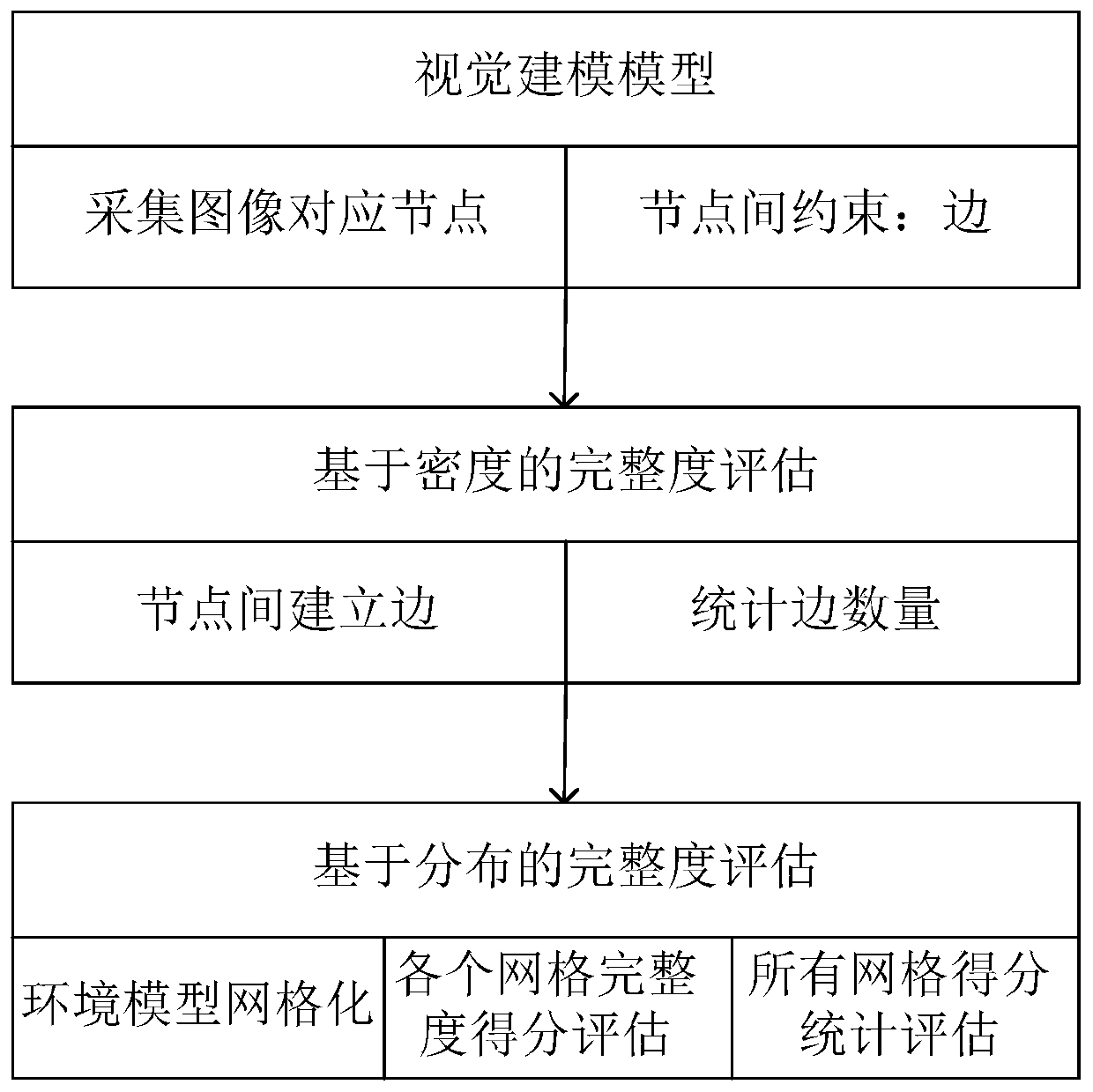
[0041] see figure 1 As shown, a method for improving the reliability of monocular vision positioning by evaluating the integrity of the environmental model described in this embodiment first establishes an environmental expression model; then evaluates the integrity of the established environmental expression model; uses the integrity evaluation Based on the results, it is judged whether the environment modeling is completed or not, and the exploration is stopped when the requirements are met.
[0042] Specifically, the established model is expressed in the topological form of a graph; the nodes of the graph represent the collected images; the edges in the graph express the relative relationship of existing nodes; each node corresponds to a collected image in the established model; The establishment of the edge is obtained through the association calculation of the pixel da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More