

Gait optimization method of ball searching of NAO robot in RoboCup competition
An optimization method and robot technology, applied in the field of robotics, can solve the problems of poor stability, slow ball-seeking speed, and easy falling down of NAO robots, and achieve the effects of good stability, not easy to trip, and fast and stable ball-seeking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
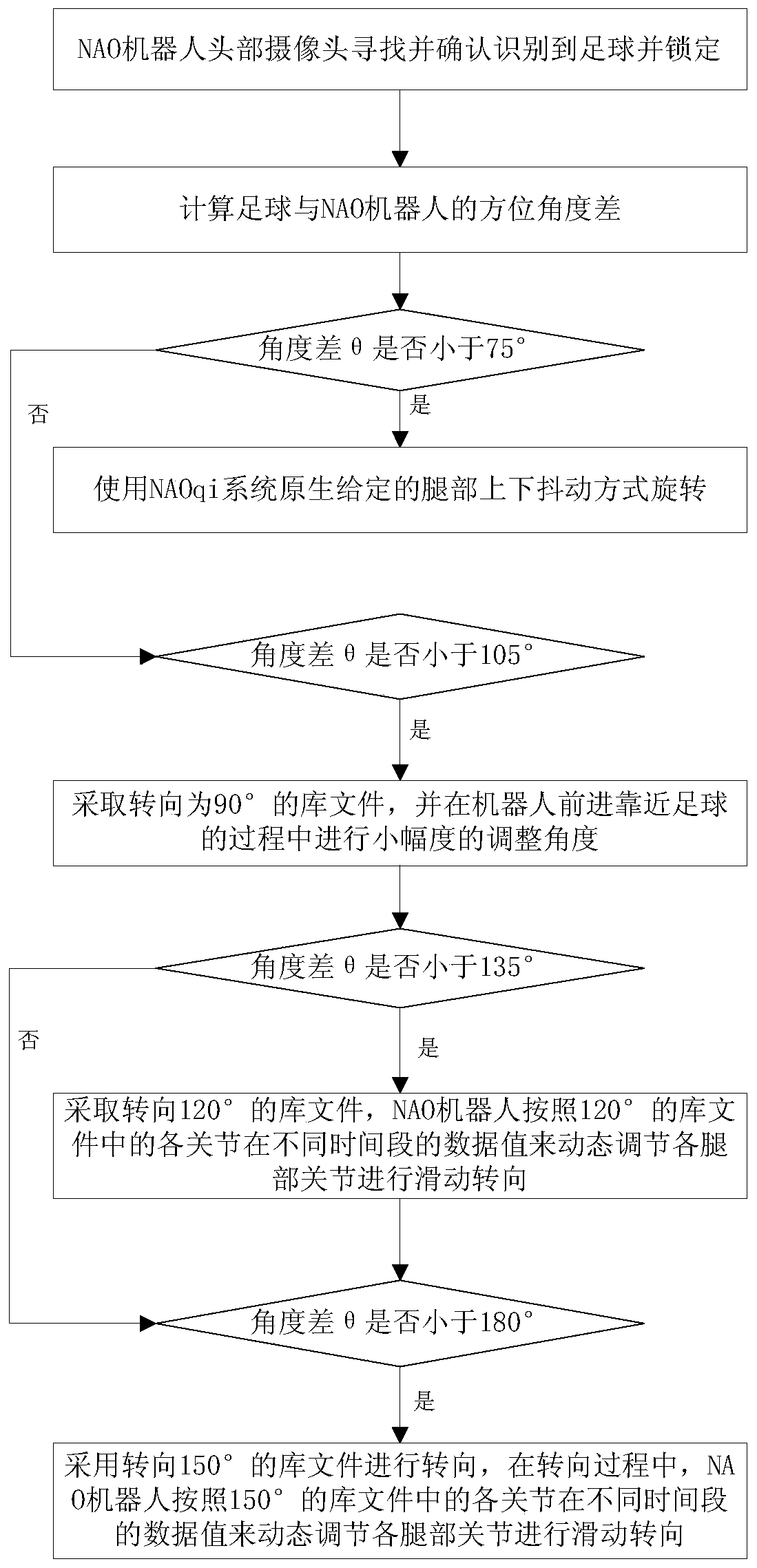
[0030] The ball-seeking gait optimization method of the NAO robot of the present invention comprises the following steps:
[0031] The camera on the head of the NAO robot looks for and confirms that the football is recognized and locked, and calculates the azimuth angle difference between the football and the NAO robot; the azimuth angle difference is the angle between the football and the NAO robot's frontal direction.
[0032] If the angle difference θ is less than 75°, use the NAOqi system's natively given leg shaking up and down to rotate;
[0033] If the angle difference θ is greater than 75°...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More