Multi-robot task assignment method based on VDSOM algorithm
A multi-robot and task allocation technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems that the robot cannot reach the task target point, the direction angle of the robot's movement is not considered, and the task allocation algorithm does not have actual benefits, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0076] The present invention will be further described below in conjunction with the accompanying drawings.
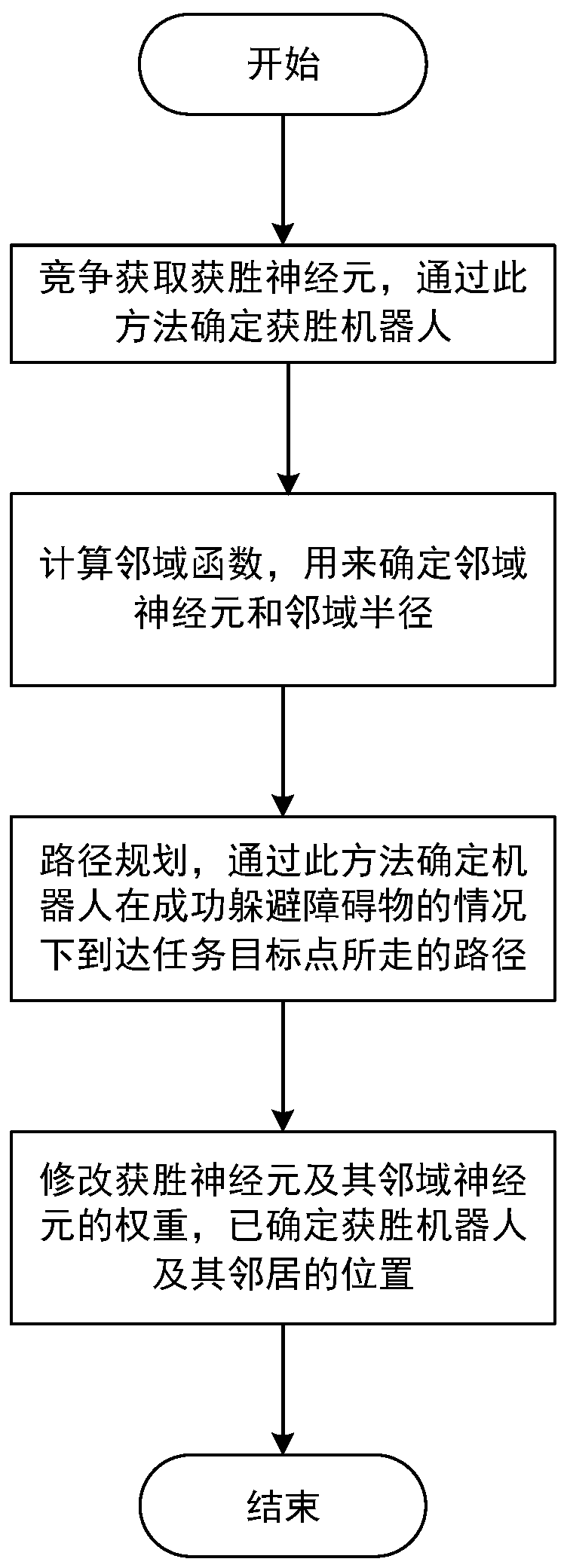
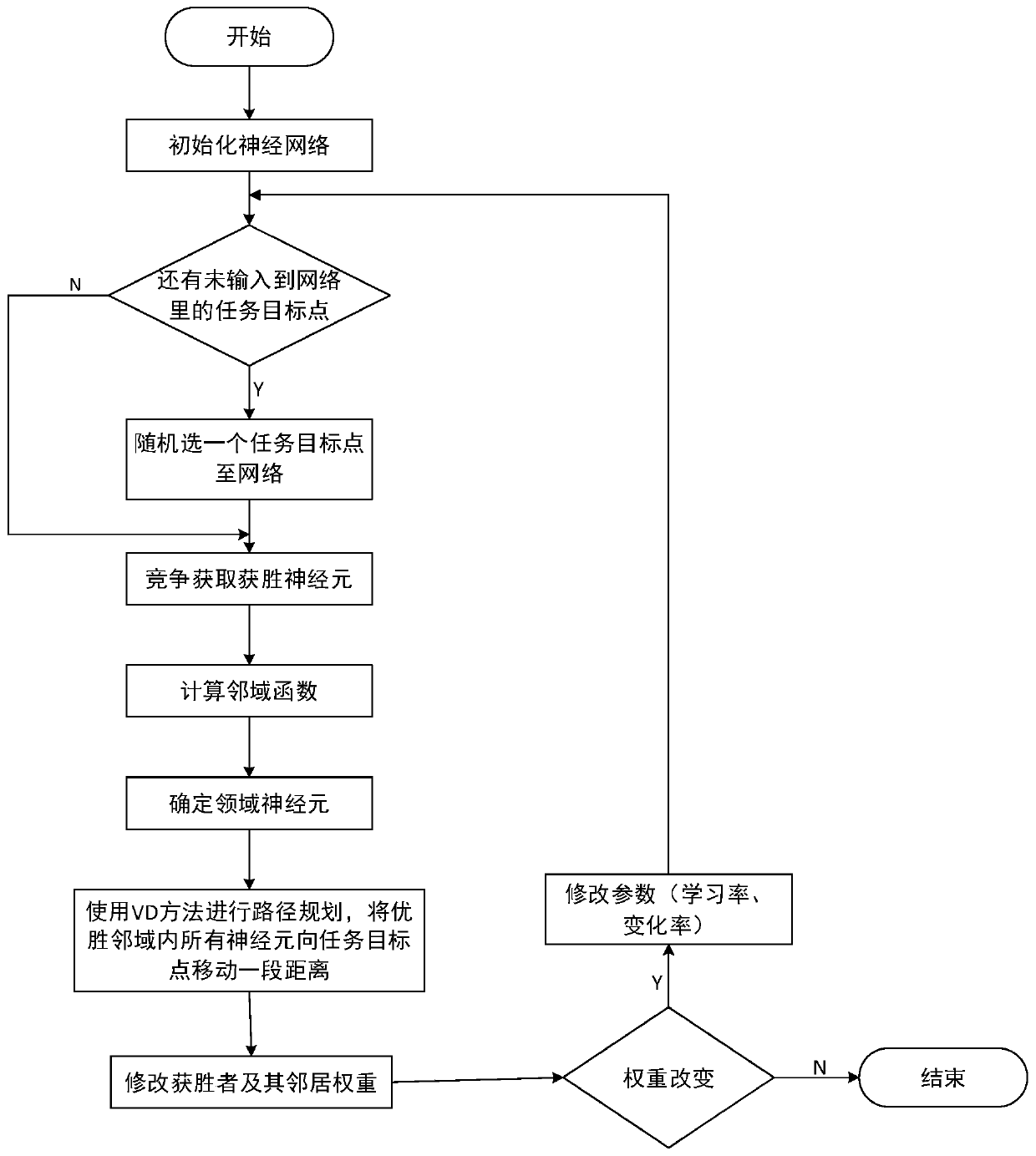
[0077] In multi-robot systems, coordination and cooperation problems among multiple robots are often encountered. No matter from the point of view of a single robot or multiple robots, the main problem of multi-task assignment research is to consume the least amount of energy under the premise of completing the assigned tasks. Multi-robot task assignment and path planning is to study how to effectively assign task targets so that mobile robots can visit all targets in the work area with obstacles along a better path. The goal of multi-robot system task assignment is that all target points in the area can be reached by robots, and the total cost should be as small as possible. For a single robot, the cost is measured by the distance from the starting point to all the target points passed, while for the entire multi-robot system, the total cost is the sum of the costs o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com