

Rail suspension intelligent inspection robot system
A robot system, intelligent inspection technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inspection fatigue, inaccurate walking, unstable equipment operation, etc., to avoid human error, compact structure, simple structure effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
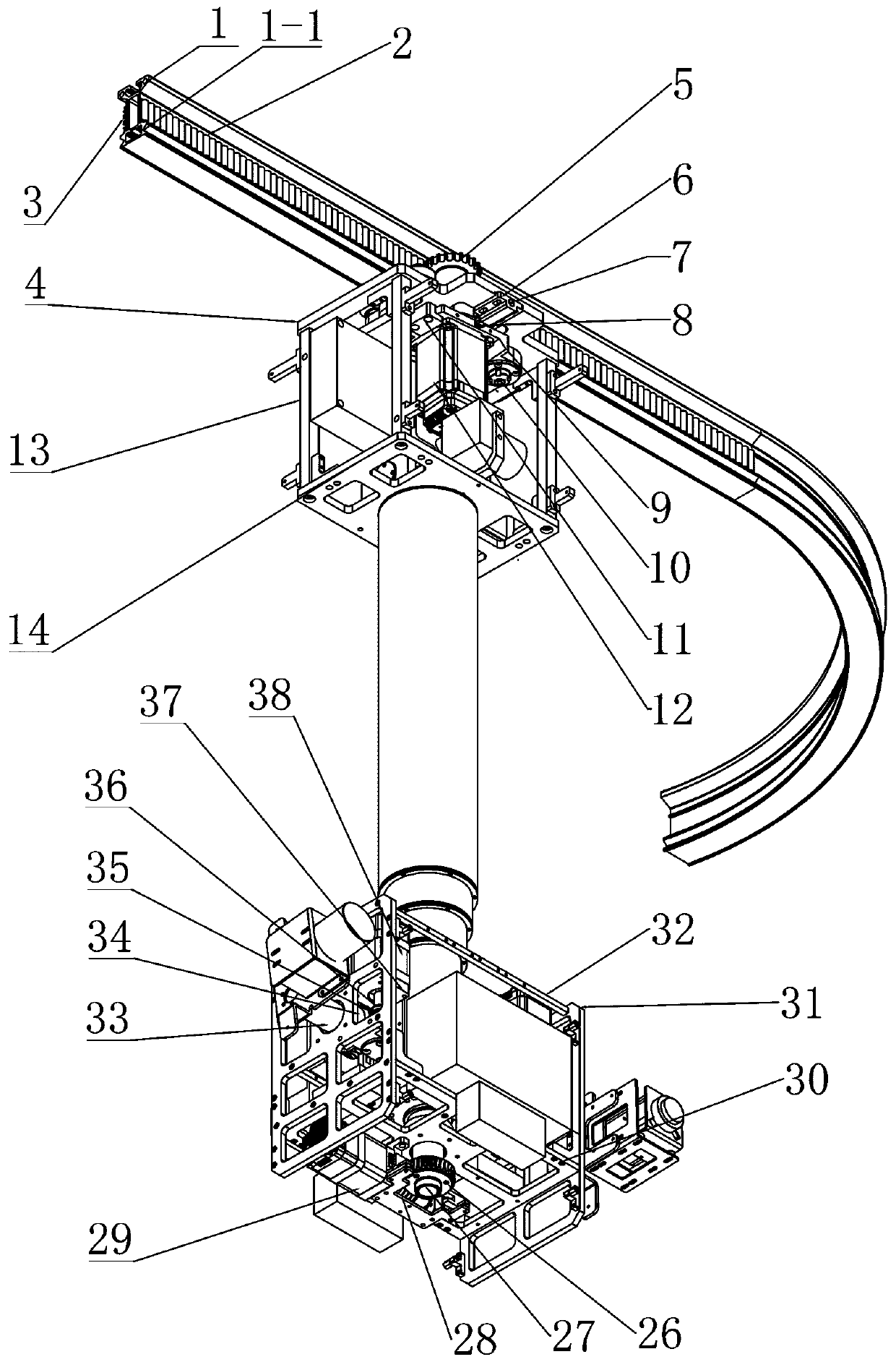
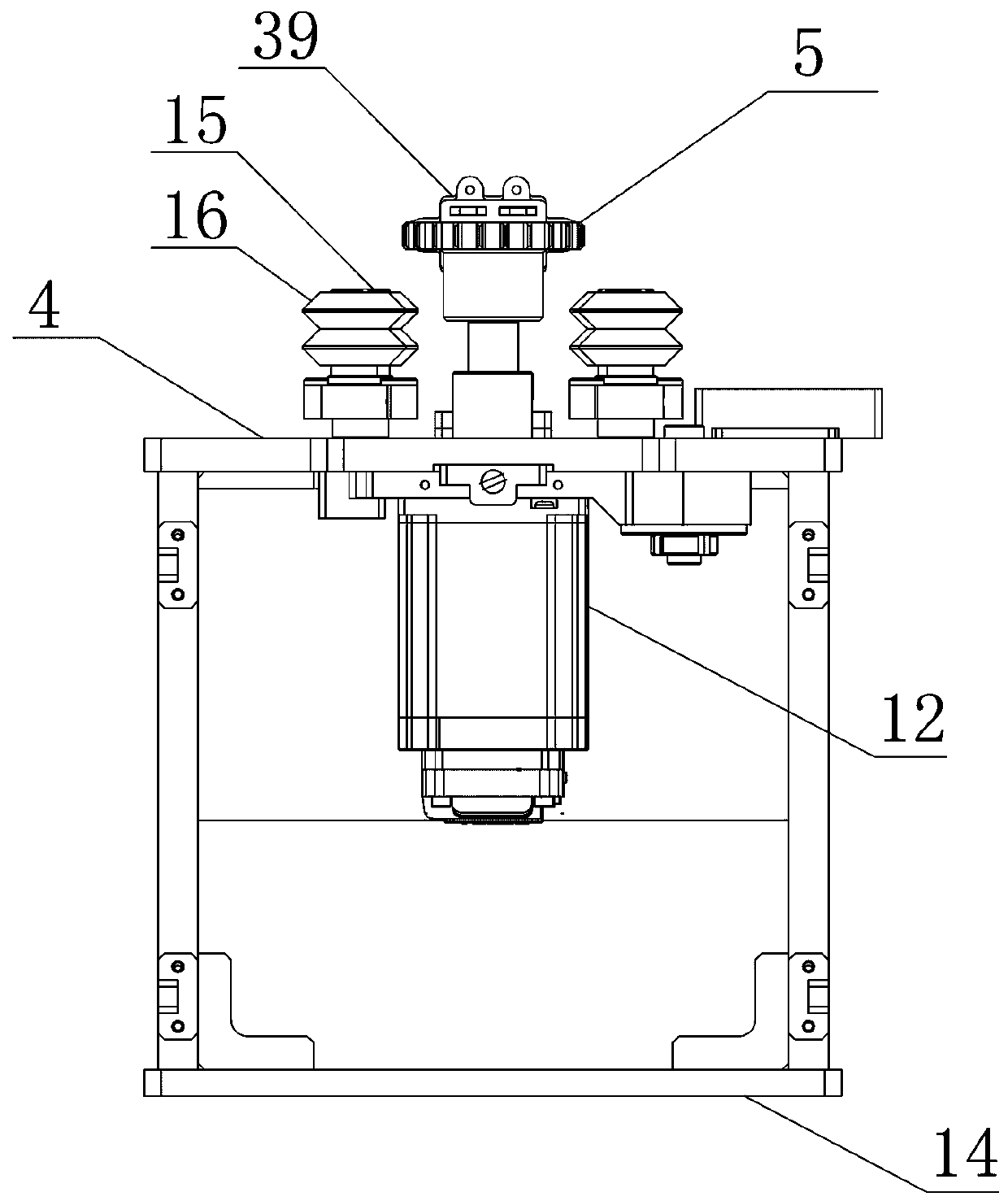
[0052] Reference attached Figure 1-14 , A rail suspension intelligent inspection robot system includes a V-shaped groove track 1, a walking trolley, a lifting mechanism and a camera rotating pan / tilt.
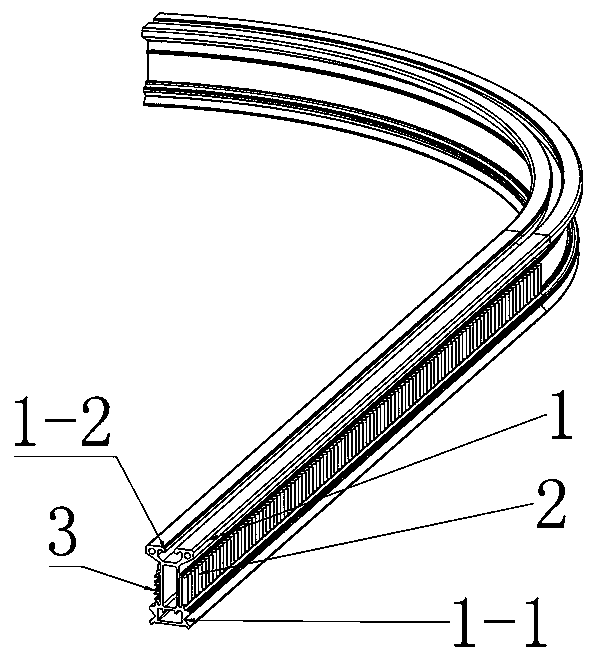
[0053] The two sides of the lower part of the V-shaped groove track 1 are respectively provided with V-shaped guide positioning grooves 1-1, and the top of the V-shaped groove track is provided with T-shaped grooves 1-2 for lifting and fixing. The two sides of the V-groove track 1 are respectively equipped with a sliding contact line 3 and a synchronous toothed belt 2.
[0054] The two sides of the V-groove track 1 are respectively equipped with a sliding contact line 3 and a synchronous toothed belt 2. According to the location of the electrical equipment or electrical cabinet, the V-groove track 1 is fixedly arranged along the installation position of the electrical equipment or electrical cabinet. The V-groove track 1 is arranged in a revolving and turning shape, which is conve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More