

Vehicle yaw stability control method based on hybrid optimization of genetic algorithm and GPC
A technology of stability control and genetic algorithm, which is applied in the field of stability control of electric vehicles with four-wheel independent drive in-wheel motors, can solve problems such as failure to maintain optimality, quality degradation, and difficulty in ensuring model accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0084] In the present embodiment, the vehicle yaw stability control method based on genetic algorithm hybrid optimization GPC is carried out as follows:
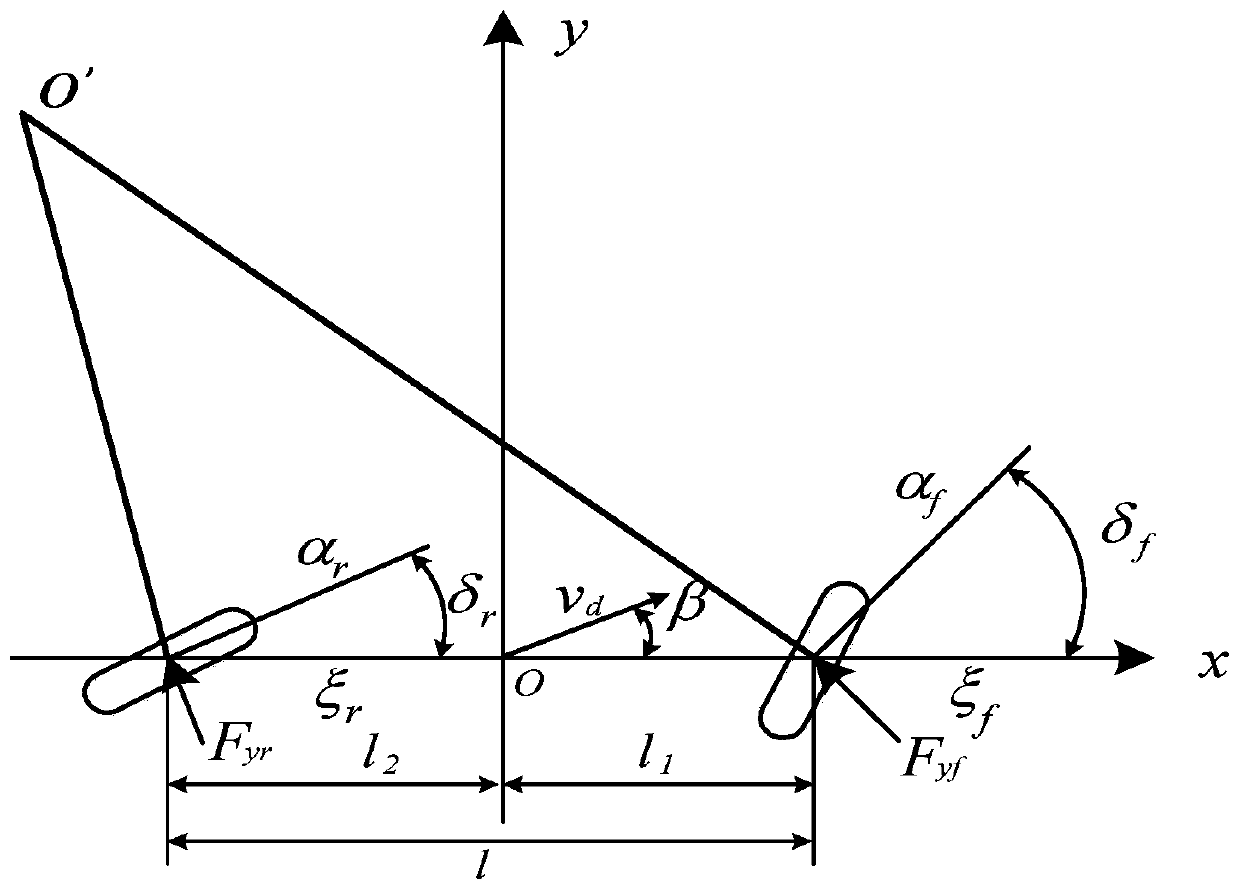
[0085] Step 1: Build as figure 1 The two-degree-of-freedom linear model of the vehicle shown is used as a predictive model, and the ideal yaw rate and ideal center-of-mass side slip angle are calculated by using the predictive model.
[0086] In the specific implementation, the ideal yaw rate and the ideal center-of-mass sideslip angle are calculated according to the following process:
[0087] Step 1.1: Based on the two degrees of freedom of the vehicle's lateral motion and yaw motion, establish a vehicle two-degree-of-freedom linear model represented by equation (1):
[0088]
[0089] β is the side slip angle of the center of mass, is the sideslip angular velocity of the center of mass, r is the yaw angular velocity, is the yaw angular acceleration;
[0090] l 1 is the distance from the center of mass to the fron...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More