

Scanning radar-based target three-dimensional acceleration motion model calculating method
A technology of three-dimensional acceleration, calculation method, applied in the direction of reflection/re-radiation of radio waves, instruments, measuring devices, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
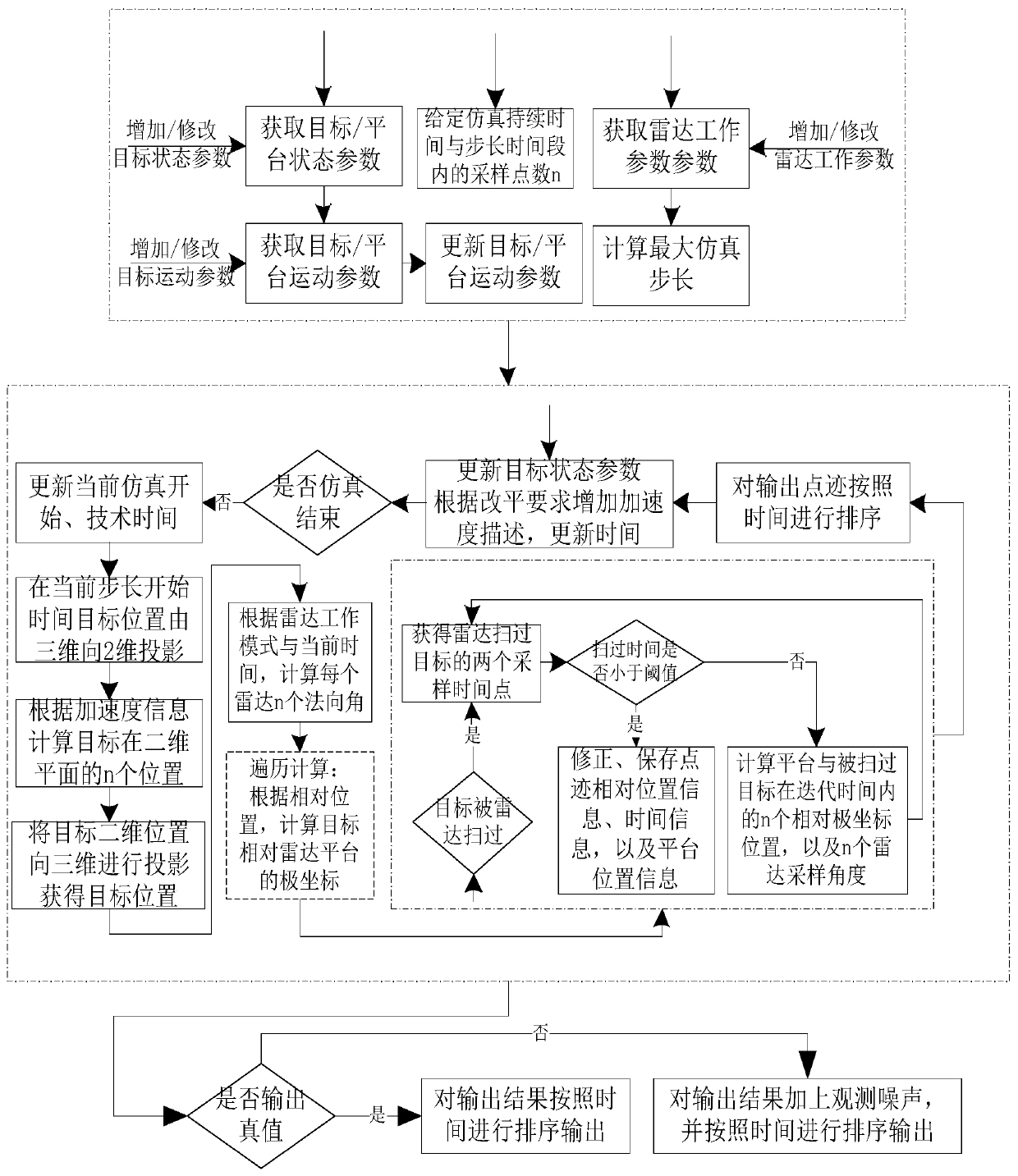
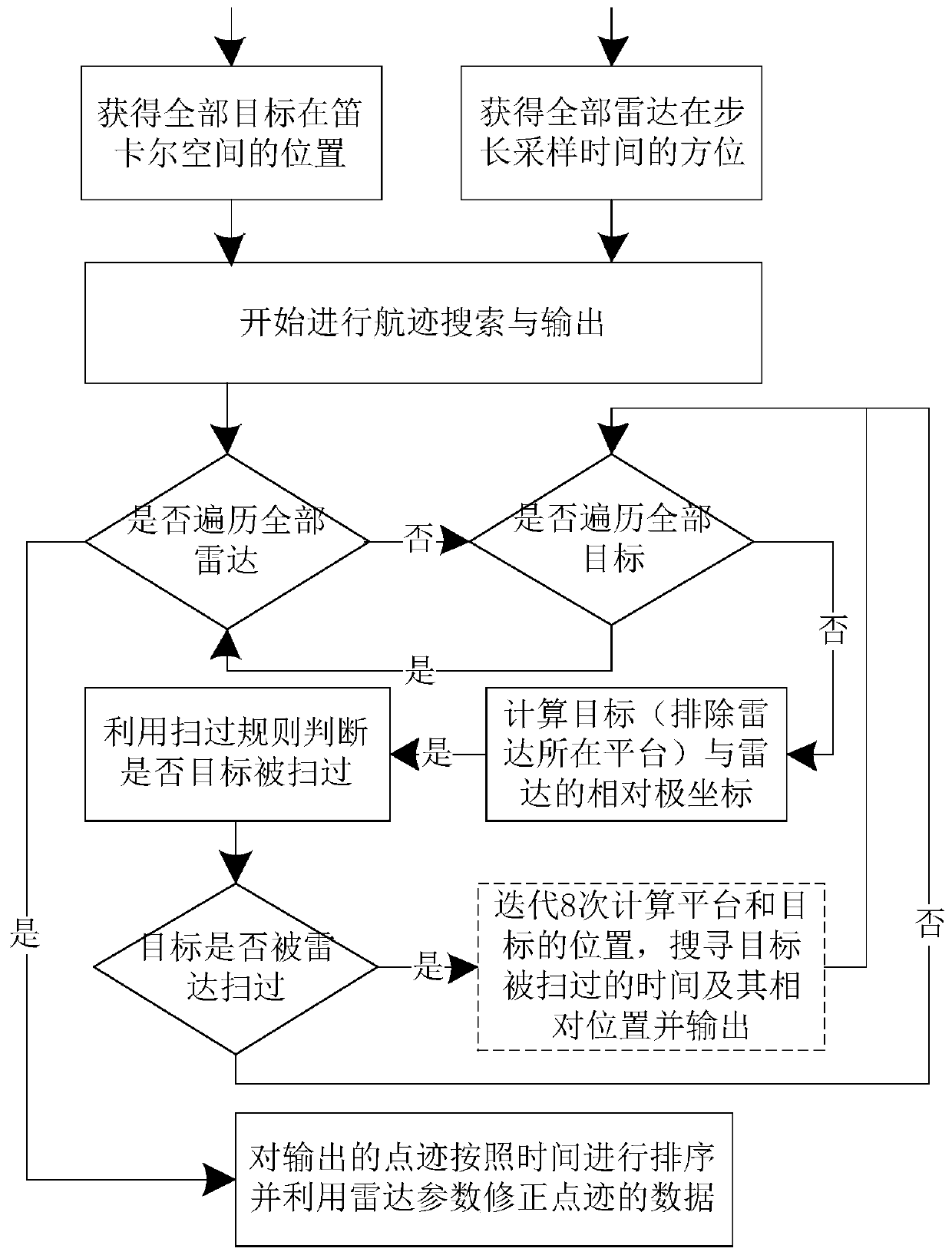
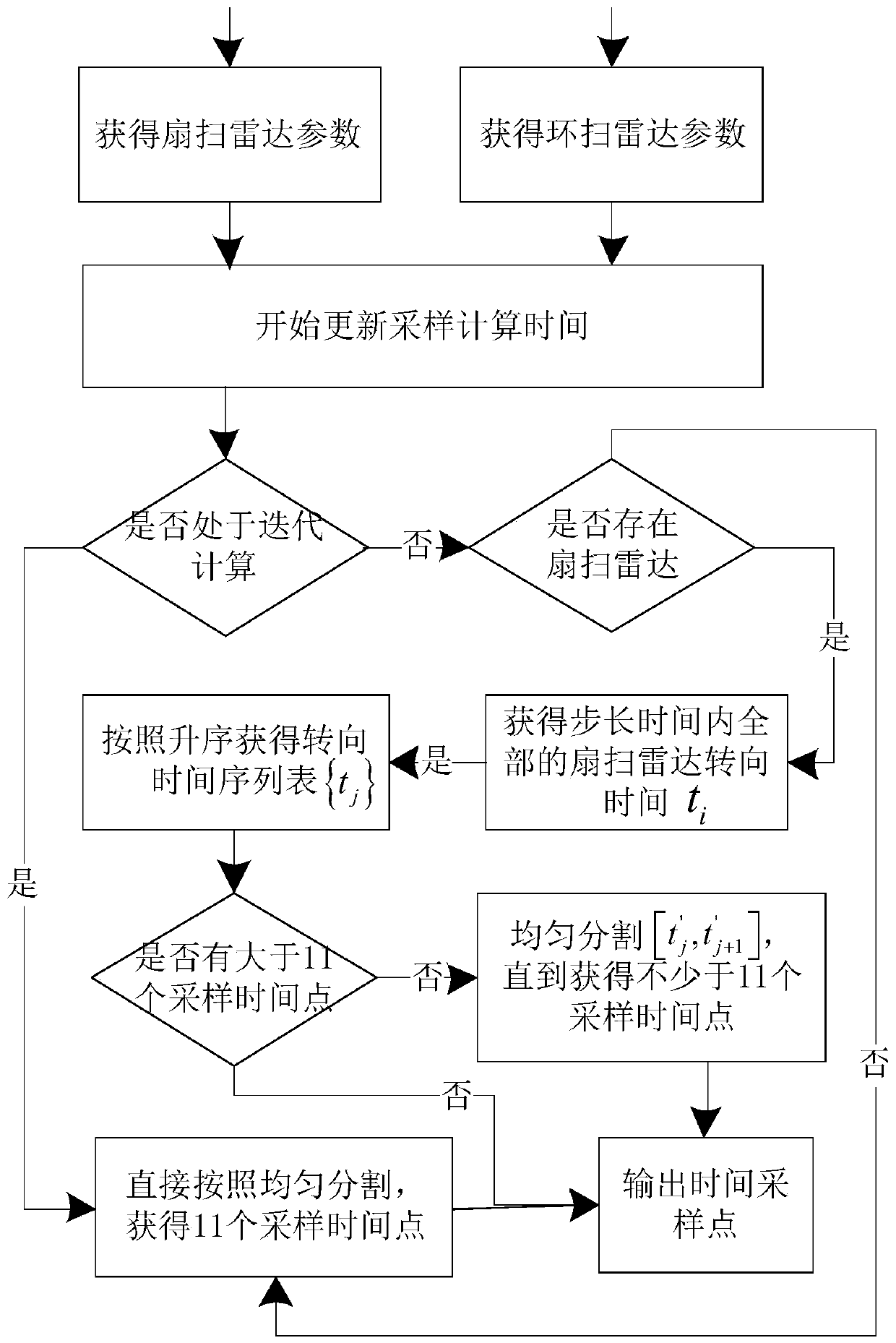
[0013] The present invention basically includes the key processing steps of target motion calculation model, position space transformation, radar azimuth calculation, step update and sampling time calculation.
[0014] 1) Target motion model and its mathematical description;
[0015] In order to uniformly describe the target motion, simplify the model, ignore the influence of gravity and resistance, simply assume that the target is only in the tangential acceleration Normal acceleration value (a n ,λ), where a t ∈ R, a n ≥0 are the acceleration values in the tangential and normal directions respectively, and the heading angle is defined as (θ, φ), θ is the angle between the heading and the xy plane, and φ is the angle between the heading angle on the xy plane and the positive x axis, When the normal acceleration is 0, it is considered that the target is moving on the x-y plane where the current relative position is after a certain angle of rotation. It is required that t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More