

Scene segmentation and target modeling method based on concavo-convex and RSD features
A technology of scene segmentation and modeling method, which is applied in the fields of unmanned driving, unmanned aerial vehicle, underwater robot, deep space exploration, and computer vision. Computational operation limit usage and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
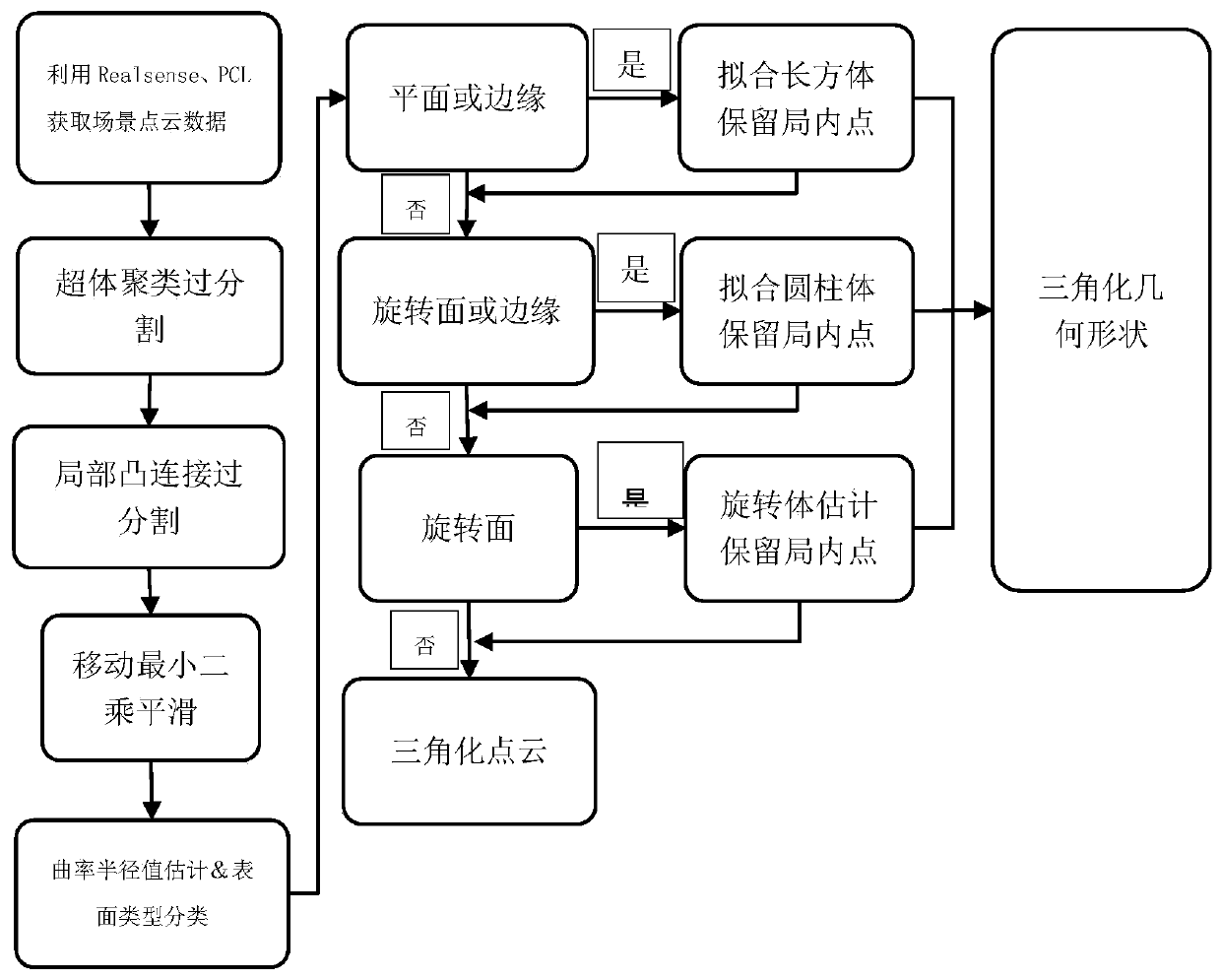
[0035] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
[0036] Step 1, use the PCL point cloud library, Realsense Grabber software package, Relasense SDK, RealsenseSR300 driver, and Realsense RS300 device to obtain the scene point cloud image;
[0037]Step 2, perform super-volume clustering over-segmentation on the basis of the denoised scene point cloud, control the super-voxel clustering process according to the formula (1), and divide the entire space;
[0038]
[0039] where (R seed =0.01m) is the distance of the seed, D c is the difference in color, D n Denotes the difference on the normal, D s Represents the difference in point distance. w c Indicates the weight of color difference in supervoxel similarity, w s Represents the weight of the point distance difference in the similarity, w n Represents the weight of the difference on the normal line in the similarity, which defines the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More