

Umbilical cable exit tool for underwater robot
An underwater robot and tool withdrawal technology, which is applied to manufacturing tools, manipulators, etc., can solve the problems of damage to the umbilical cable terminal, inability to disassemble, and difficulty in disassembling the umbilical cable, and achieve stable and reliable operation, easy loading and unloading transportation, and compact overall structure design. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in further detail below with reference to the drawings.
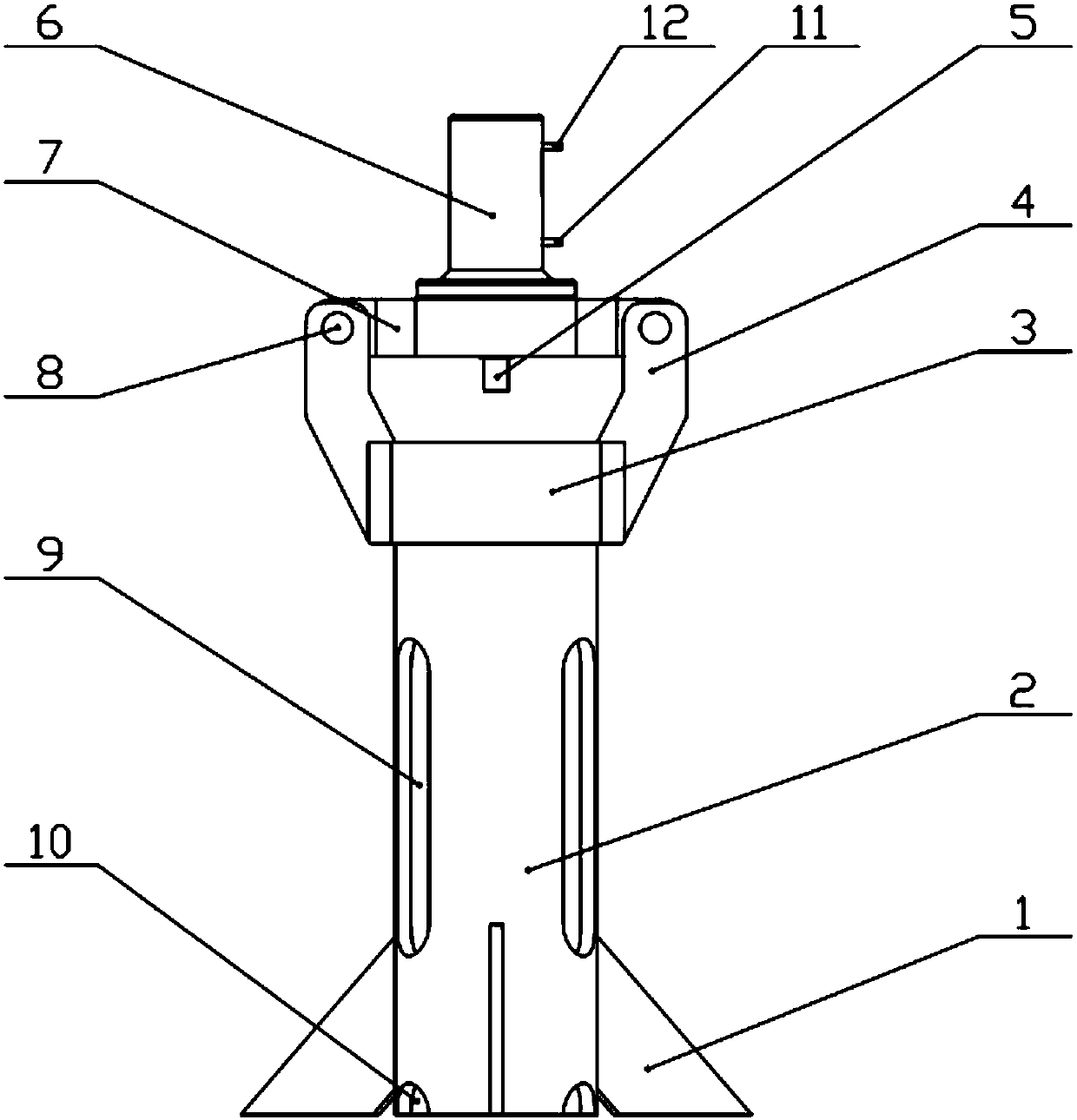
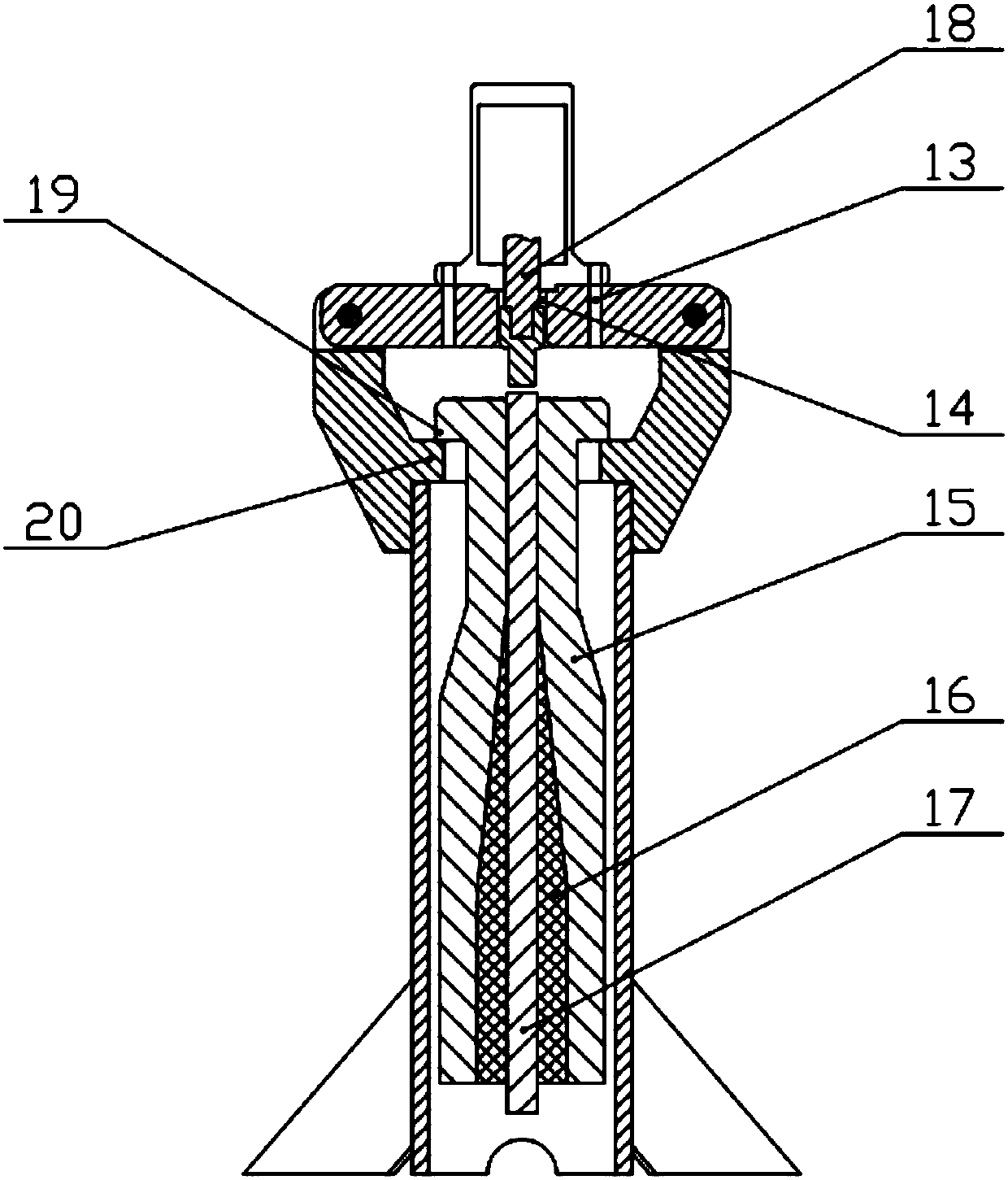
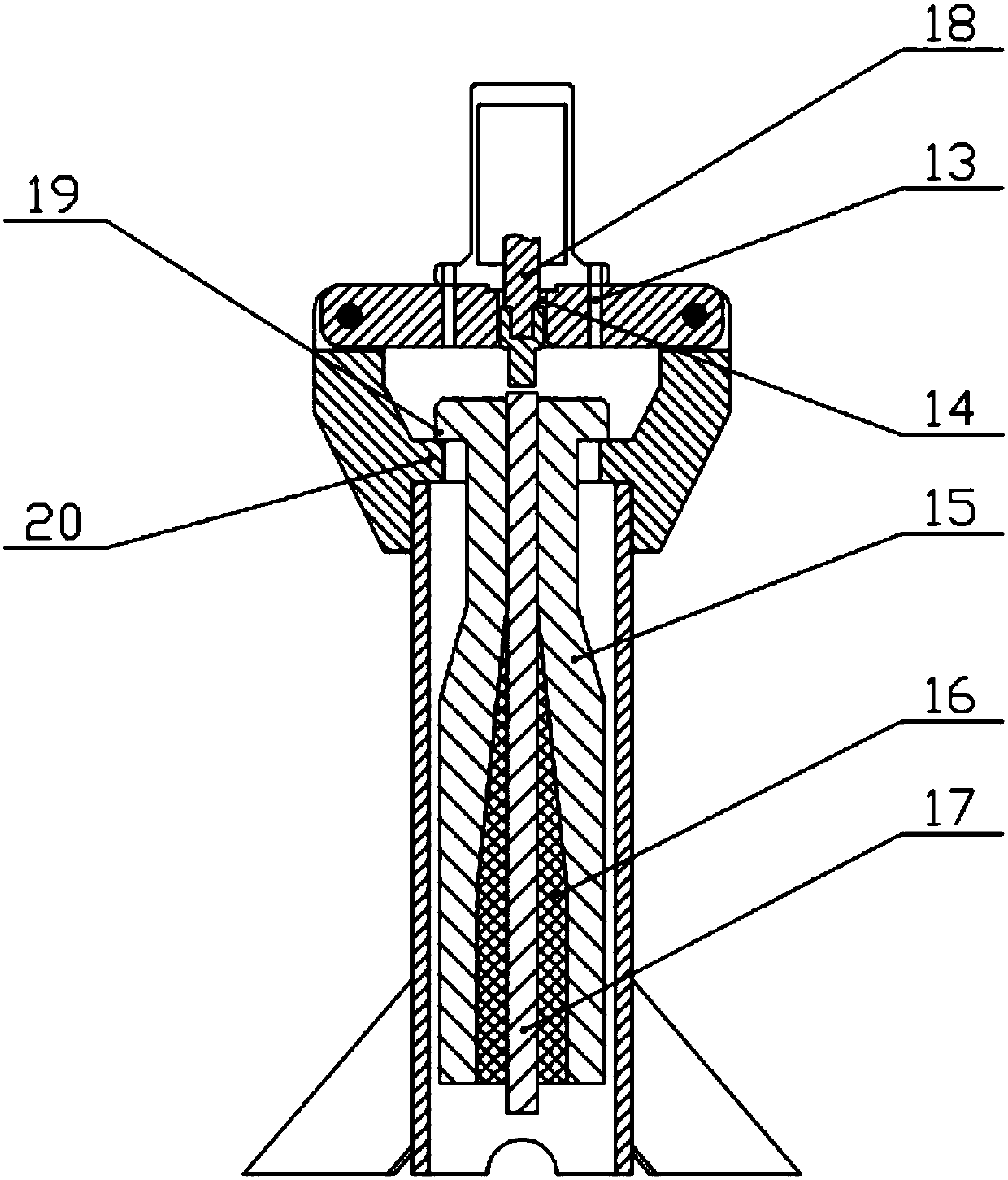
[0019] Such as Figure 1~2 As shown, the present invention includes a support cylinder 2, a sleeve 3, a support arm 4, a support plate 7, a cable withdrawal push rod 5 and a hydraulic cylinder 6, wherein the sleeve 3 is welded to the upper end of the support cylinder 2, and the sleeve is 3 is provided with a sleeve shoulder 20 on the inner side, the support arm 4 is welded to the outer wall of the sleeve 3, and the upper end of each support arm 4 is connected to the support plate 7 through a pin 8, and the hydraulic cylinder 6 is fixed on the support plate 7, the unwinding push rod 5 is installed at the end of the cylinder rod 18 of the hydraulic cylinder 6. When the mechanism is working, the umbilical cable terminal 15 is placed in the supporting cylinder 2 and the umbilical cable terminal retaining ring 19 at the upper end abuts against the sleeve shoulder 20, and the unwin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More