

Gripper
A clamper and rotating plate technology, applied in the mechanical field, can solve the problems of poor clamping effect and inability to achieve multi-directional grasping, and achieve the effect of simple structure and low energy consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
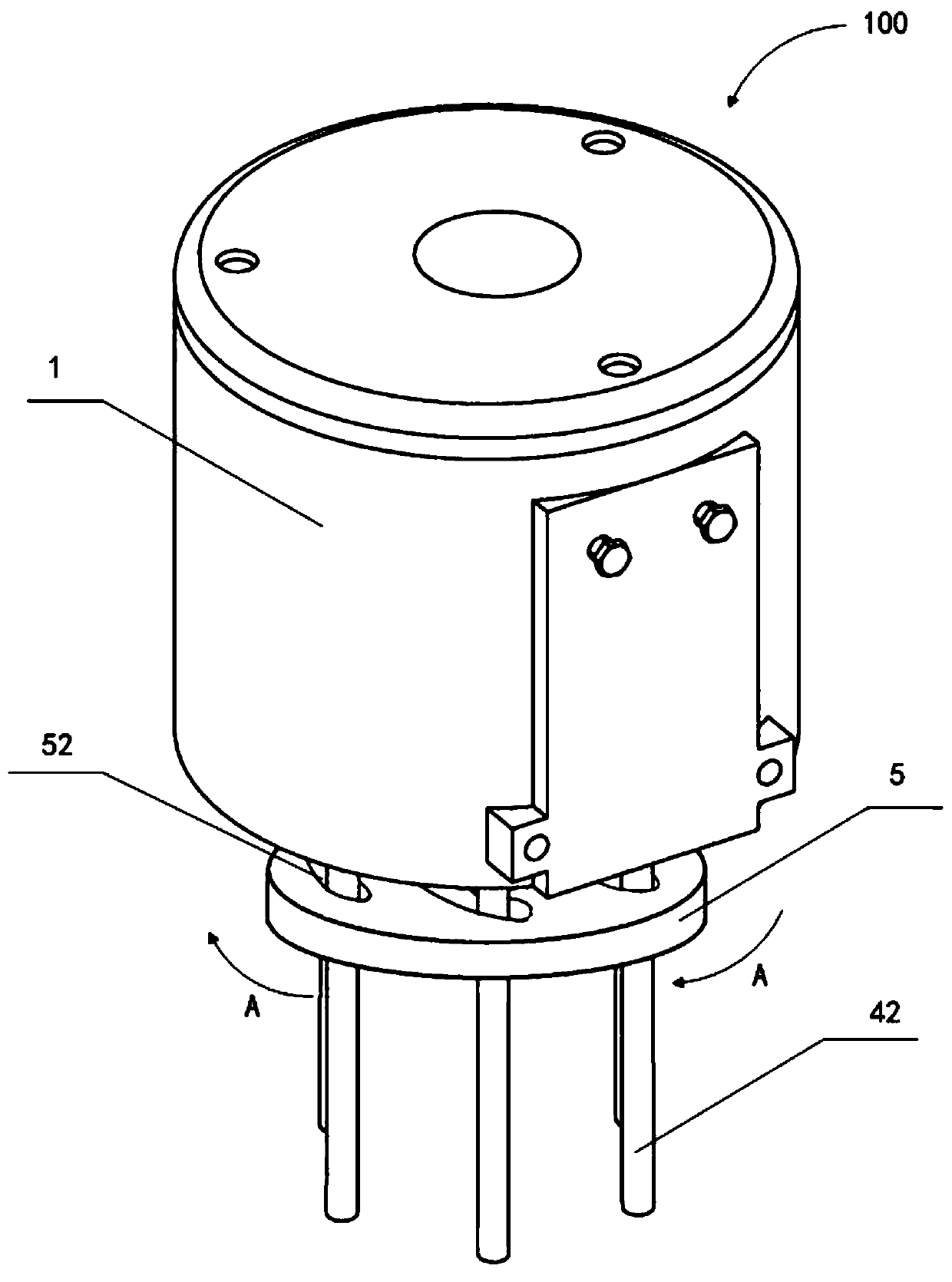
[0052] Embodiments of the present invention provide a holder, such as Figure 1 to Figure 9 As shown, the holder 100 includes: a base 1, a driving mechanism 2 provides a driving force; a rotating plate 5 is connected to the driving mechanism 2, and is driven to rotate by the driving force, and the rotating plate 5 is provided with at least three slide slots; at least three A fork 42, the first end of each fork 42 is rotatably connected with the base 1, and the second end of each fork 42 passes through a slide groove 52 respectively, and as the rotating plate 5 rotates, each fork 42 is guided by sliding grooves, wherein the number of sliding grooves can be greater than or equal to the number of swing bars 42 .
[0053] Specifically, as figure 1 As shown, three swing rods 42 are provided on the base 1 , wherein each swing rod 42 can rotate relative to the base 1 around the connection point between the swing rod 42 and the base 1 . Three slide slots 52 are arranged on the rotat...
Embodiment 2
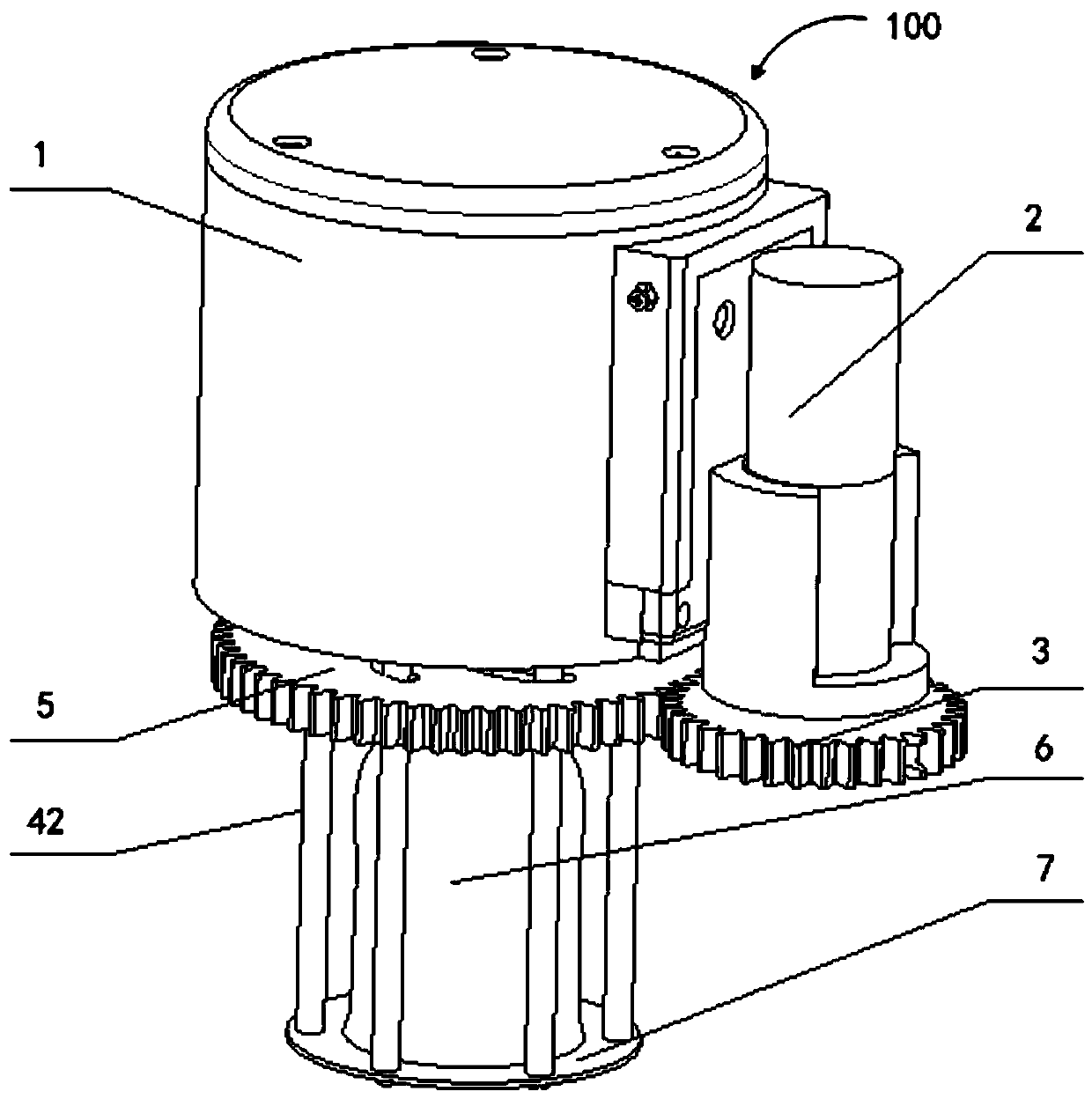
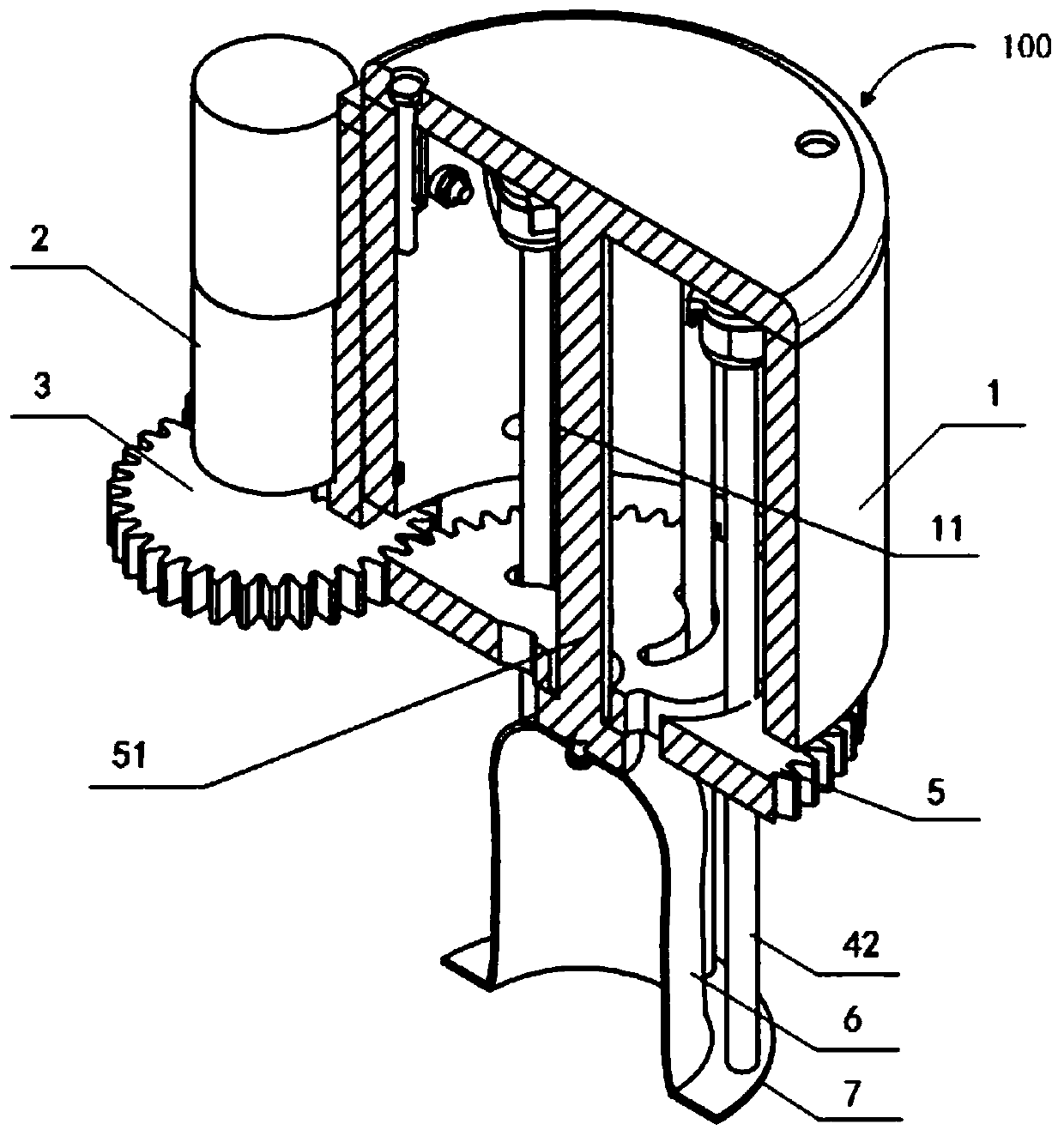
[0059] The difference with Embodiment 1 is that: on the basis of Embodiment 1, further, the clamper further includes: the clamper 100 also includes: a film cover 6, the edge of the film cover 6 and the first of at least three swing bars 42 The two ends are fixedly connected, and the top center of the film cover 6 is fixedly connected with the center of the rotating plate 5 . The film cover 6 is connected with at least three swing bars 42. When the swing bars 42 slide in the slide groove 52, the swing bars 42 gather or separate to drive the film cover 6 to shrink or open, as figure 2 and Figure 6 shown.
[0060] Preferably, the holder 100 further includes: an elastic member 7 fixedly connected with the edge of the film cover 6 and the swing bar 42 for gathering the edge of the film cover 6 . Similarly, when the swing rod 42 gathers or separates, the swing rod 42 can drive the elastic member 7 to contract or expand.
[0061] Such as Figure 6 to Figure 8 As shown, when the...
Embodiment 3
[0064] The difference from Embodiment 1 and Embodiment 2 is that: on the basis of Embodiment 1 or Embodiment 2, further, the clamper further includes: a transmission member 3, and a control device. The transmission part 3 is connected with the power output end of the driving mechanism 2 , and the output end of the transmission part 3 is connected with the rotating plate 5 . The control device is electrically connected with the driving mechanism 2, and is used to control the acting direction of the driving force, so that the rotating plate 5 can rotate in different radial directions, so as to achieve the purpose of automatically controlling the pendulum 42 to grab or release objects. Such as Figure 6 and Figure 7 As shown, the gripper 100 realizes the adjustment of the gripping speed and the gripping force control through the design of the transmission member 3 and the control of the driving mechanism 2 . In the case of the transmission member 3 , the driving force of the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More