

Design Method of Harvester Path Tracking Controller Based on Adaptive Model Predictive Control
A technology of self-adaptive model and predictive control, applied in the direction of self-adaptive control, general control system, control/regulation system, etc., can solve the problem of large hysteresis of harvester, and achieve the effect of solving large hysteresis.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
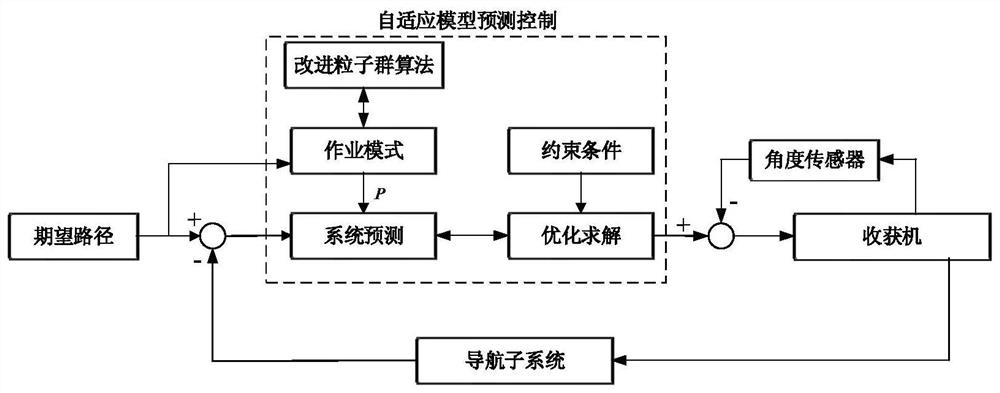
[0044] A design method of a harvester path tracking controller based on adaptive model predictive control, comprising the following steps:
[0045] Step 1: Establish the three-degree-of-freedom kinematics model of the harvester, the specific method is as follows:
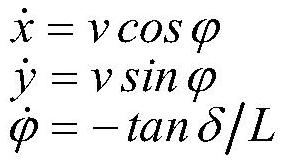
[0046] The mathematical models of model predictive control include dynamic models and kinematic models. The kinematics model is suitable for low-speed occasions. Since the operating speed of the harvester is usually lower than 3.5m / s, the present invention establishes a three-degree-of-freedom kinematics model with dual rear wheels supporting steering and dual front wheels driving. In the navigation coordinate system, the kinematics model of the harvester is expressed as
[0047]
[0048] In the formula, (x, y) is the center coordinate of the front axis of the harvester; is the navigation angle of the vehicle body; v is the driving speed of the harvester; δ is the steering angle of the rear wheels; L is the wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More