

Visual identification system applied to unmanned aerial vehicle for target tracking and locking
A visual recognition and UAV technology, applied in the field of visual recognition system, can solve the problems of restricting the development of UAV, low degree of automation, unstable flight, etc., and achieve the effect of superior real-time tracking performance, high degree of automation, and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
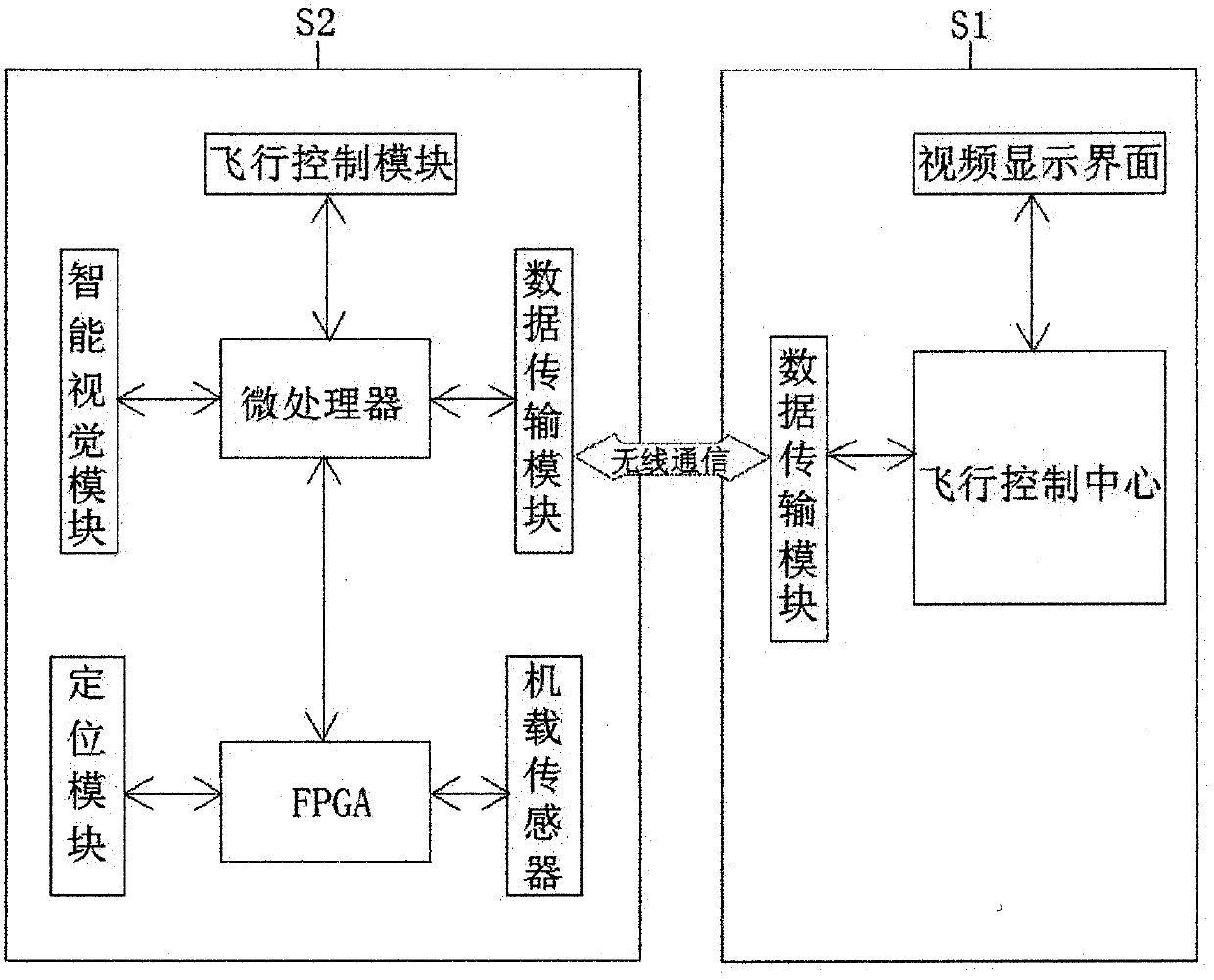
[0019] see Figure 1-Figure 4 A visual recognition system for drones to track and lock targets is shown, including a ground control platform S1 and a drone tracker S2. Ground control platform S1 is composed of flight control software, data transmission module and video display interface. The UAV tracker is composed of microprocessor, FPGA, positioning module, airborne sensor, intelligent vision module, flight control module, and data transmission module. The configuration and functions of the ground control platform S1 and the UAV tracker S2 are described in detail below.
[0020] In this embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More