

A Surround Target Positioning Method Based on Unmanned Aerial Vehicle Swarm
A target positioning and UAV technology, which is applied in the field of surrounding target positioning based on UAV swarms, can solve problems such as poor positioning accuracy, and achieve the effect of high algorithm accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] In the following, the present invention will be further described according to specific implementation examples and in conjunction with the accompanying drawings, so that the implementation steps of the present invention can be understood more clearly.
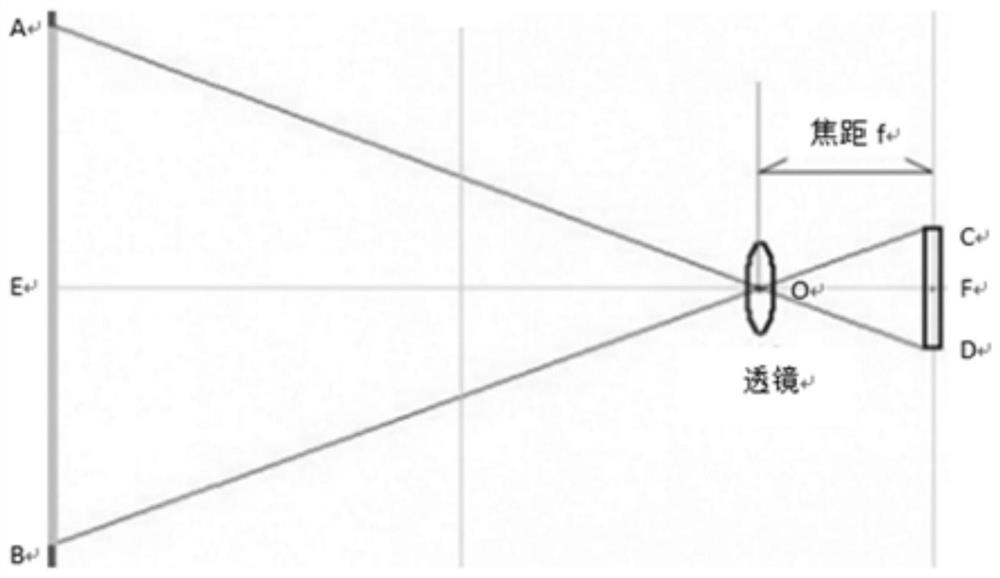
[0028] Assume that in three-dimensional space, there are i (i=1,2...n) drones to locate the target, the coordinate system is OXYZ, and the coordinates of target C are (x, y, z), the three-dimensional The coordinates are (x i ,y i ,z i ), this paper defines the azimuth as the angle between the projection of the UAV and the target line on the OXY plane and the X positive semi-axis, and the pitch angle as the angle between the UAV and the target line and the OXY plane. The azimuth and pitch angles measured by the i-th UAV are (α i ,β i ). In order to understand the principle, two UAVs A and B are used to locate the target C, such as figure 1 shown.
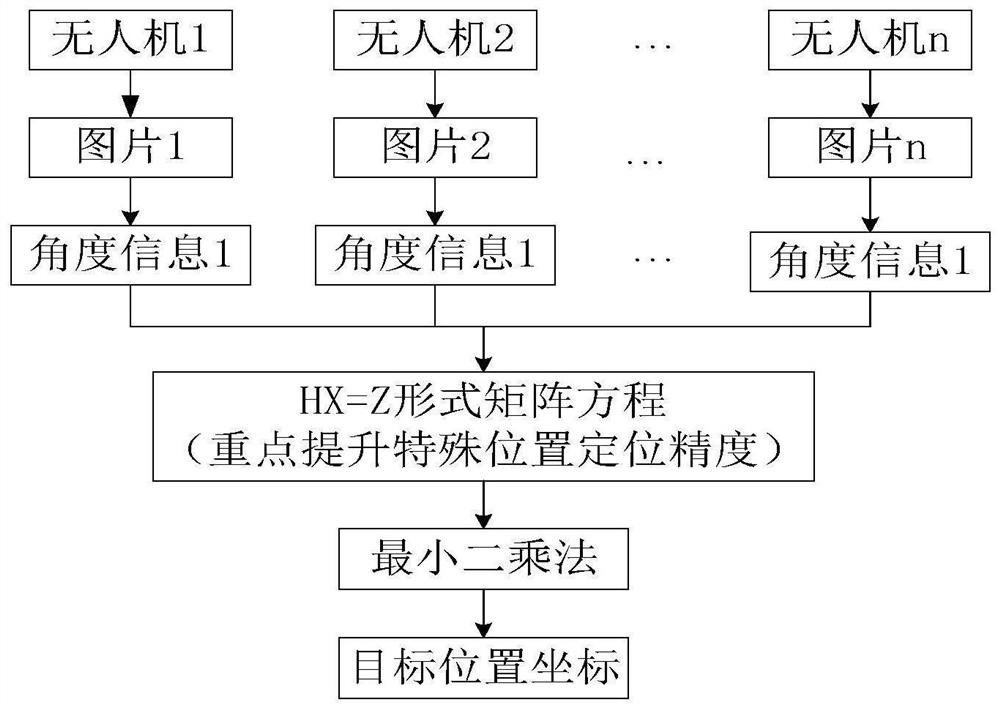
[0029] Such as figure 2 As shown, each UAV shoots the target, an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More