

Method and device for target position detection
A technology of target position and target, which is applied in the field of target position detection, and can solve problems such as the inability to output the target distance from the camera device, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
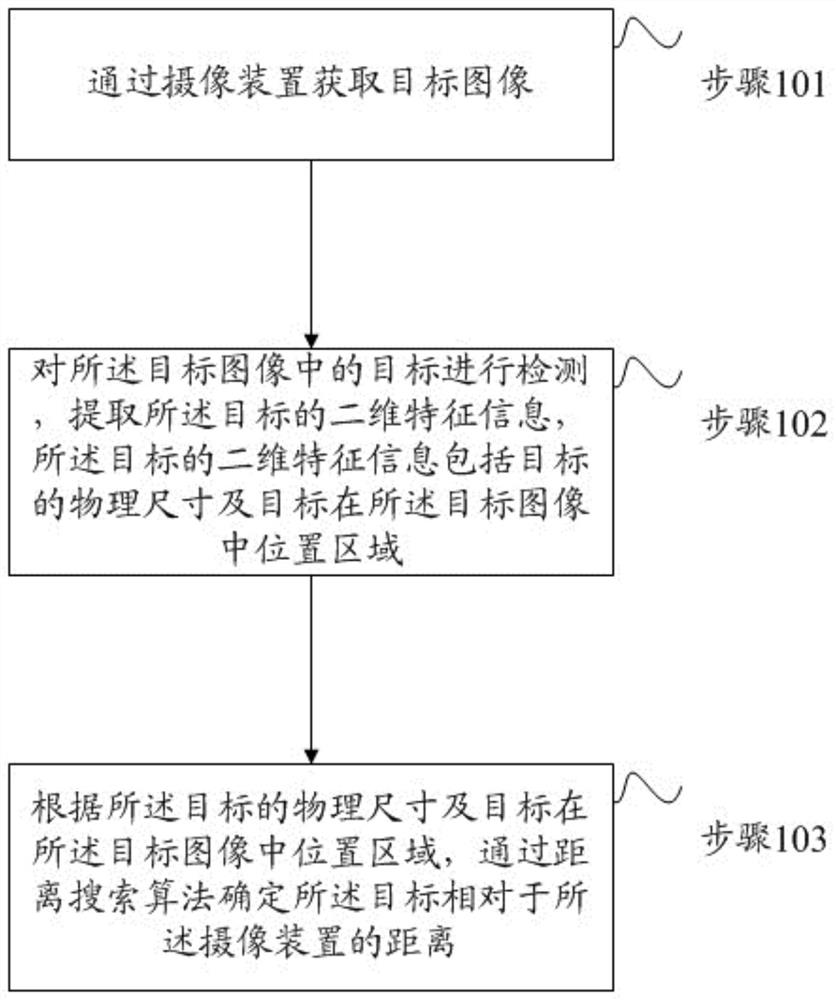
[0074] The invention provides a method for target distance detection, such as figure 1 shown, including:
[0075] Step 101, acquiring a target image through a camera;
[0076] The applicable scenarios of the embodiments of the present invention include but are not limited to automatic driving scenarios. In the automatic driving scenario, the camera device is a camera device on an automatic driving vehicle. When the vehicle is started, the camera device starts to shoot driving videos, so The target image mentioned above is a certain frame picture in the driving video.
[0077] The target may be, but not limited to, a person, a vehicle, an animal, a building, and the like.
[0078] When the target image of the item is acquired in the above step 101, if the acquired images are from multiple angles of the target, it is possible, but not limited to, to select an image with the best pixels / including the specified part of the target as the target image. There are too many limitati...
Embodiment 2
[0141] This embodiment is a device for target distance detection, such as figure 2 Said, comprises processor 201 and memory 202, wherein, said memory, 22 stores executable program code, when said program code is executed, makes described processor 201 be used for performing the following steps:
[0142] Obtain the target image through the camera device;
[0143] Detecting the target in the target image, extracting the two-dimensional feature information of the target, the two-dimensional feature information of the target includes the physical size of the target and the position area of the target in the target image;
[0144] According to the physical size of the target and the position area of the target in the target image, the distance of the target relative to the camera device is determined through a distance search algorithm.
[0145] Optionally, the two-dimensional characteristic information of the target further includes a deviation angle of the target, and the d...
Embodiment 3
[0162] This embodiment provides a device for target distance detection, the schematic diagram of the device is as follows image 3 As shown, the above-mentioned devices include:
[0163] an acquisition unit 301, configured to acquire a target image through a camera;
[0164] The extraction unit 302 is configured to detect the target in the target image, and extract the two-dimensional feature information of the target, the two-dimensional feature information of the target includes the physical size of the target and the position area of the target in the target image ;
[0165] The determining unit 303 is configured to determine the distance of the target relative to the camera device through a distance search algorithm according to the physical size of the target and the position area of the target in the target image.
[0166] Optionally, the two-dimensional characteristic information of the target further includes a deviation angle of the target, and the deviation ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More